IRC - Industrial Robot Control
Module Description
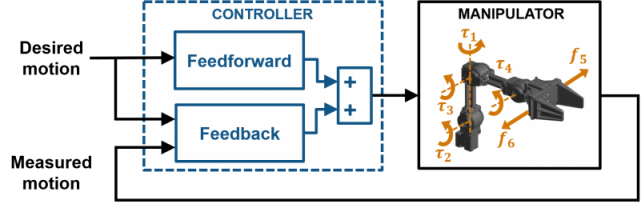
This class provides the students with an overview of standard control systems architectures employed in industrial robots. First, established frameworks for kinematic and dynamic modeling of industrial robots will be summarized. Based on the established models, different standard control architectures for robotic systems will be presented. Motion control architectures will be initially discussed, starting from purely kinematic control, and then moving to both decentralized (joint-level) and centralized (joint/task space) dynamic architectures. Architectures to control the interaction between robot and environment will subsequently be discussed, including impedance control, force control, and hybrid position/force control. Finally, camera-based motion control (visual servoing) will be discussed. The theoretical lectures will be accompanied by tutorial sessions, in which the students will be instructed to implement the developed control methods in ROS environment. At the end of the class, the students will be able to understand the main standard architectures used for the control of industrial manipulators, design their own control algorithms for specific target applications, and implement them in state-of-the-art software used in robotics.
Additional Info
Responsible Instructor: Prof. Gianluca Rizzello
Assign to Departments: Systems Engineering
Semester: Summer Semester
Admission requirements: no formal requirements, although it is recommended to take “Kinematik, Dynamik und Anwendung in der Robotik” first
Type of Course: Lecture / Exercise/problem-solving class
Examination: Oral Examination
Weekly Hours: 3 h/w, of which 2 h/w Lectures and 1 h/w Tutorials
Credit Points: 4