Funded Research Projects

DFG Research Grants
The objective of this proposal is the development of novel concepts for energy harvesting, which combine soft dielectric elastomer (DE) generators with bi-stable mechanisms and software intelligence. These novel systems will overcome the limitations of state-of-the-art mechanical energy harvesters in an unprecedented way, by enabling high conversion rates from broadband sources concentrated in the low-frequency range (0.1-10 Hz). This will open up new perspectives for renewable energy conversion from the environmental sources, such as ocean waves. In this research project, we will address all the steps which are needed to enable for the first time bi-stable DE generator technology. To achieve this goal, the PI Jun.-Prof. Gianluca Rizzello (Saarland University) will develop novel solutions at both hardware and software level, ranging from systematic methods to design, fabricate, and characterize bi-stable DE generators, up to optimal energy extraction policies based on self-sensing control algorithms. Prof. Giacomo Moretti (University of Trento, IT), who is a renowned expert in the field of DE generators, will also provide contributions to concept generation, design, and testing tasks through a Mercator Fellowship.
Duration: 2024 - 2027 (36 months)
Project PI: Jun.-Prof. Gianluca Rizzello (Saarland University)
Project Team: Lennart Heib (Saarland University), Prof. Giacomo Moretti (University of Trento, Italy)

DFG SPP 2206 KOMMMA – Cooperative Multistage Multistable Microactuator Systems
The goal of this project is the development of the first miniaturized, fully polymeric, highly flexibly, and large-stroke actuator/sensor system based on an array of dielectric elastomer (DE) transducers, to enable cooperative tasks at the micro-scale in, e.g., future wearable and soft robotics applications. This task will be jointly carried out by three groups, two from Systems Engineering at Saarland University (Rizzello, Seelecke) and one from HTW Saar (Schultes), in continuation of the collaboration already established during the first SPP 2206 funding period. During Phase 1, the project focused on generating a basic understanding of cooperative effects in a 1D array of macro-scale DEs. Building upon these results, in Phase 2 we will address development and control of a cooperative 2D array of DEs at the micro-scale. To achieve this goal, the first group (Rizzello) will develop novel mathematical models and cooperative control algorithms for micro-scale DE array applications, while the second group (Seelecke) will investigate new miniaturization and 2D system integration concepts for multi-functional DE micro-actuator/-sensor systems, and the third group (Schultes) will address novel fabrication concepts of micro-structured, system-integrable electrodes needed to achieve cooperative local activation of the individual array taxels. Similarly to Phase 1, the achievement of the project goal will require a highly interdisciplinary approach, which will be ensured by the complementary expertise of the three groups. The common location in Saarbrücken will also ensure a close and synergistic collaboration for the entire project duration.
Duration: 2023 - 2026 (36 months)
Project PI: Jun.-Prof. Gianluca Rizzello (Saarland University), Prof. Günter Schultes (Saarland University), Prof. Stefan Seelecke (Saarland University)
Project Team: Saverio Addario (Saarland University), Alberto Priuli (Saarland University), Benjamin Zemlin (HTW Saar)
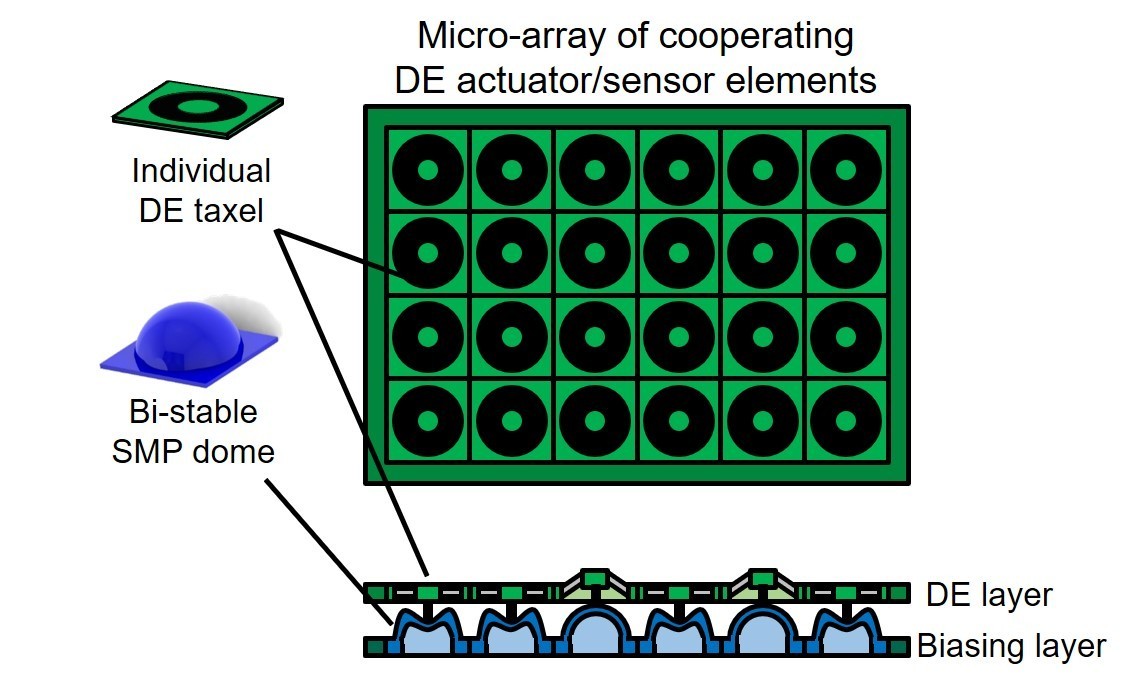
DFG SPP 2206 KOMMMA – Cooperative Multistage Multistable Microactuator Systems
The objective of this proposal is the development of a novel highly flexible, large-stroke multi-segment micro-actuator system based on layers of dielectric elastomer (DE) arrays and multi-stable shape memory polymers (SMP). Novel modeling and design tools accounting for the strong electromechanical coupling between cooperating segments as well as for inherent self-sensing capabilities of individual actuator segments will be developed. These tools will enable a systematic, application-oriented design on the one hand, while also serving as a basis for sensorless distributed control methods for cooperative actuation to be developed in a future phase of the SPP. The design of novel multi-stable bias mechanisms from SMP film layers will be a result from the tools as well as an application-oriented electrode geometry of the DE segments. The multi-stable bias will be manufactured by appropriately shape setting the SMPs, resulting in energy-efficient large-stroke actuation. The electrode patterns will be applied through novel sputtering techniques which will be developed during the project, enabling large strokes and high compliance while maintaining high electrical conductivity. The work will be organized into three projects which will be conducted in parallel by three groups, two of which from Systems Engineering/Material Science & Engineering at Saarland University, and one of which from Saarland University of Applied Sciences (htw saar). The first group (Rizzello) will focus on developing micro-scale models to allow for systematic design and self-sensing strategies for arrays of interacting DE membrane actuators, and enable cooperative control design in a future stage. At the same time, the second group (Seelecke) will develop new design concepts and miniaturization strategies for multistable distributed actuators, as well as integrated driving/sensing electronics. Finally, the third group (Schultes) will address aspects related to material and design of compliant micro-structured electrodes necessary for localized activation of segmented DE membranes. The complementary expertise of the three groups will cover different aspects of DE technology which are required for the achievement of the target cooperative actuator system, ensuring the multidisciplinary approach needed for a successful concept development. In addition, the common location in Saarbrücken will ensure a close and synergistic collaboration for the entire project duration.
Duration: 2019 - 2022 (36 months)
Project PI: Jun.-Prof. Gianluca Rizzello (Saarland University), Prof. Günter Schultes (Saarland University), Prof. Stefan Seelecke (Saarland University)
Project Team: Sipontina Croce (Saarland University), Jonas Hubertus (HTW Saar), Julian Neu (Saarland University)
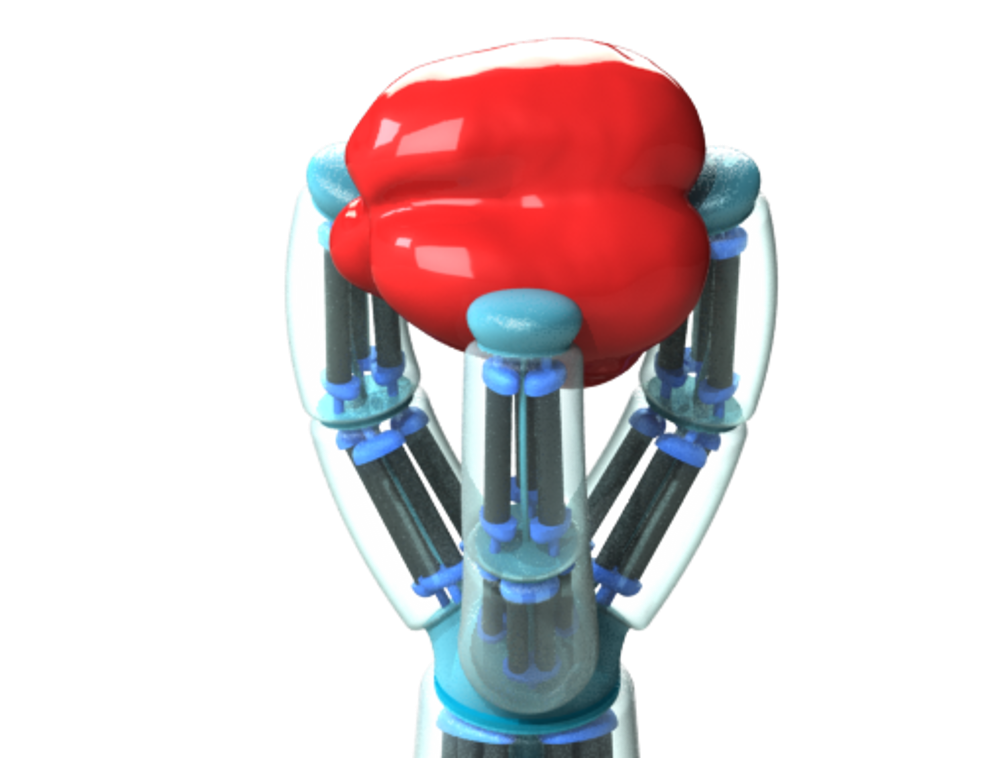
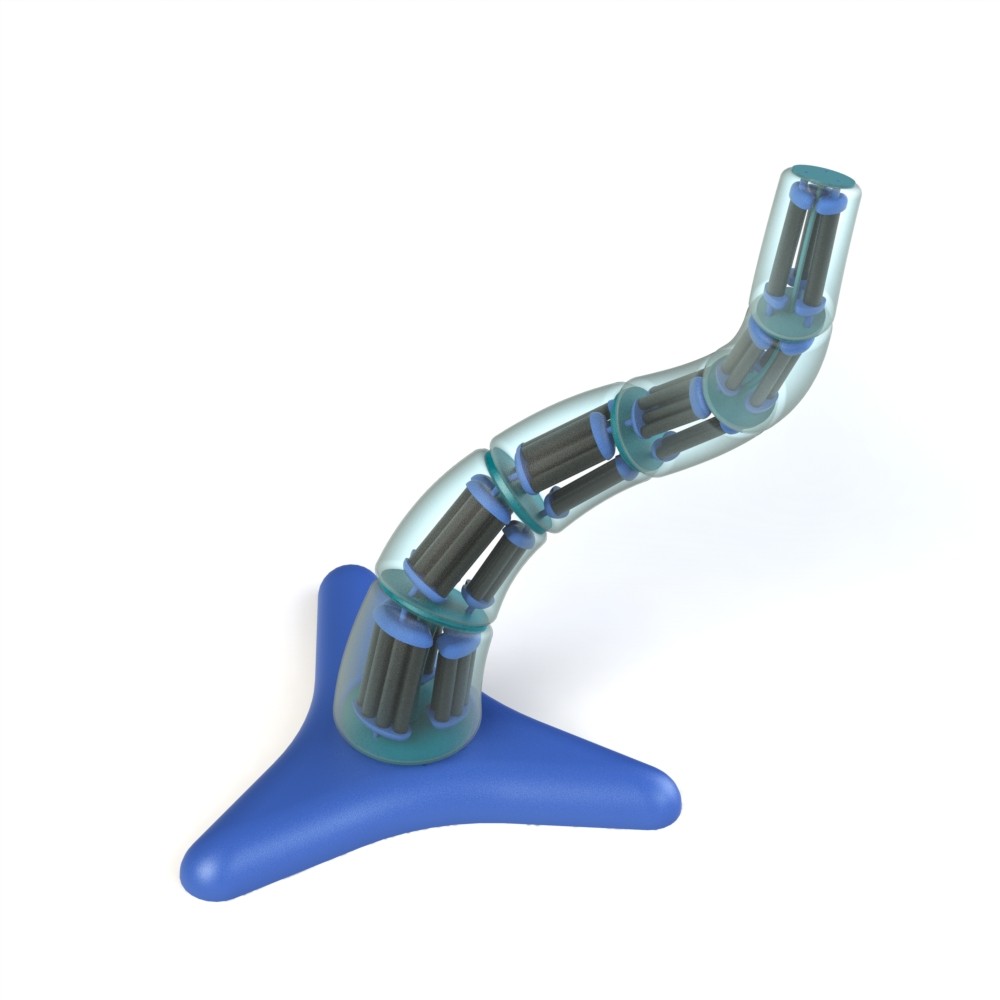
DFG SPP 2100 SMRS - Soft Material Robotic Systems
The goal of this project is the development of the first three-dimensional soft robotic tentacle arm with dielectric elastomer (DE) artificial muscles as core actuator/sensor elements, to enable highly flexible and safe user interaction as well as soft endoscopy or gripping applications in the future. This task will be jointly addressed by two groups from Systems Engineering at Saarland University (Seelecke, Rizzello), in continuation of the collaboration already established during the first SPP 2100 funding period. While in Phase 1 the focus was on generating a basic system understanding via planar DE soft robot concepts, during Phase 2 the developed methods and algorithms will be extended to address the case of a scalable three-dimensional and hyper-redundant DE soft tentacle arm. To this end, the first group (Seelecke) will investigate novel design, fabrication, and integration concepts for three-dimensional DE soft tentacle arms, while the second group (Rizzello) will develop mathematical models and self-sensing-based control algorithms for proper system understanding and accurate positioning/interaction. As for Phase 1, the achievement of this goal will require a strongly interdisciplinary approach, which will be covered by the complementary expertise of the two groups. The common location at Saarland University will also ensure a close and synergistic collaboration for the entire project duration.
Duration: 2022 - 2025 (36 months)
Project PI: Jun.-Prof. Gianluca Rizzello (Saarland University), Prof. Stefan Seelecke (Saarland University)
Project Team: Julian Kunze (Saarland University), Giovanni Soleti (Saarland University)
DFG SPP 2100 SMRS - Soft Material Robotic Systems
The main objective of this proposal is the development of a soft actuator/sensor robotic system based on dielectric elastomer (DE) materials. Due to their intrinsic compliance and ability to work as actuators and sensors simultaneously (self-sensing), DEs appear as ideal candidates for the development of novel solutions for soft machines not achievable with standard transduction technologies. The proposed research work will be organized into two projects, which will be conducted in parallel by two groups from Systems Engineering/Material Science & Engineering at Saarland University, Saarbrücken. The first group (Seelecke) will focus on hardware aspects for multi-degree of freedom actuation/sensing based on DE transducers, and will design, fabricate, and systematically validate concepts for innovative soft robotic systems. At the same time, the second group (Rizzello) will develop novel mathematical models, control concepts, and self-sensing algorithms suitable for soft DE robotic systems. The complementary expertise of the two groups will cover different aspects of DE-based soft robotics, ensuring the multidisciplinary approach needed for a successful concept development. In addition, the common location at Saarland University will ensure a close and synergistic collaboration for the entire project duration.
Duration: 2019 - 2022 (36 months)
Project PI: Jun.-Prof. Gianluca Rizzello (Saarland University), Prof. Stefan Seelecke (Saarland University)
Project Team: Matthias Baltes (Saarland University), Julian Kunze (Saarland University), Johannes Prechtl (Saarland University)