Geförderte Forschungsprojekte

DFG Sachbeihilfen
Ziel dieses Forschungsvorhabens ist die Entwicklung neuer Konzepte für die Energiegewinnung durch die Kombination von weichen Generatoren aus dielektrischen Elastomeren (DE) mit bi-stabilen Mechanismen und Software-Intelligenz. Diese innovativen Systeme werden die Beschränkungen modernster mechanischer Energiegewinnungssysteme auf beispiellose Weise überwinden, indem sie hohe Umwandlungsraten aus im Niederfrequenzbereich (0,1-10 Hz) konzentrierten Breitbandquellen ermöglichen. Dies wird neue Perspektiven für die Umwandlung erneuerbarer Energie aus Umweltquellen, wie z. B. Meereswellen, eröffnen. In diesem Forschungsprojekt werden wir alle erforderlichen Schritte in Angriff nehmen, um erstmalig eine bi-stabile DE-Generatortechnologie zu verwirklichen. Um dieses Ziel zu erreichen, wird der PI Jun.-Prof. Gianluca Rizzello innovative Lösungen sowohl auf der Hardware- als auch auf der Software-Ebene entwickeln, die von systematischen Methoden zur Auslegung, Herstellung und Charakterisierung bi-stabiler DE-Generatoren bis hin zu optimalen Energiegewinnungsstrategien auf der Grundlage von sensorlosen Regelungsalgorithmen reichen. Prof. Giacomo Moretti (Universität Trient, IT), ein renommierter Experte auf dem Gebiet der DE-Generatoren, wird im Rahmen eines Mercator-Stipendiums ebenfalls zur Konzeption, Auslegung und experimentellen Erprobung beitragen.
Laufzeit: 2024 - 2027 (36 Monate)
Projekt-PI: Jun.-Prof. Gianluca Rizzello (Universität des Saarlandes)
Projekt-Team: Lennart Heib (Universität des Saarlandes), Prof. Giacomo Moretti (Universität Trient, Italien)

DFG SPP 2206 KOMMMA - Kooperative mehrstufige multistabile Mikroaktorsysteme
Ziel dieses Projekts ist die Entwicklung des ersten miniaturisierten, vollständig polymerbasierten und hochflexiblen Aktor-/Sensorsystems mit großem Hub auf der Basis eines Arrays aus dielektrischen Elastomer (DE)-Wandlern, zur Erfüllung kooperativer Aufgaben auf der Mikroskala, z.B. in zukünftigen tragbaren und weichen Robotikanwendungen. Diese Aufgabe wird gemeinsam von drei Gruppen bearbeitet, zwei aus dem Bereich Systems Engineering der Universität des Saarlandes (Rizzello, Seelecke) und einer der HTW Saar zugehörigen Gruppe (Schultes), in Fortsetzung der bereits in der ersten Förderperiode des SPP 2206 etablierten Zusammenarbeit. In Phase 1 konzentrierte sich das Projekt darauf, ein grundlegendes Verständnis der kooperativen Effekte in einer 1D-Anordnung von makroskopischen DEs zu entwickeln. Aufbauend auf diesen Ergebnissen werden wir uns in Phase 2 mit der Entwicklung und Kontrolle eines kooperativen 2D-Arrays von DEs auf der Mikroskala befassen. Um dieses Ziel zu erreichen, wird die erste Gruppe (Rizzello) ein neuartiges mathematisches Modell und kooperative Steuerungsalgorithmen für DE-Anwendungen im Mikrobereich entwickeln, während die zweite Gruppe (Seelecke) neuartige Miniaturisierungs- und Systemintegrationskonzepte für mehrdimensionale DE-Mikroaktor-/Sensorsysteme untersuchen wird. Die dritte Gruppe (Schultes) wird sich mit neuartigen Herstellungskonzepten für mikrostrukturierte, system-integrierbare Elektroden befassen, die für eine kooperative lokale Aktivierung der einzelnen Array-Taxel erforderlich sind. Ähnlich wie in Phase 1 wird das Erreichen des Projektziels einen stark interdisziplinären Ansatz erfordern, der durch die komplementäre Expertise der drei Gruppen gewährleistet wird. Der gemeinsame Standort in Saarbrücken wird zudem eine enge und synergetische Zusammenarbeit während der gesamten Projektlaufzeit gewährleisten.
Laufzeit: 2023 - 2026 (36 Monate)
Projekt-PI: Jun.-Prof. Gianluca Rizzello (Universität des Saarlandes), Prof. Günter Schultes (HTW Saar), Prof. Stefan Seelecke (Universität des Saarlandes)
Projekt-Team: Saverio Addario (Universität des Saarlandes), Alberto Priuli (Universität des Saarlandes), Benjamin Zemlin (HTW Saar)
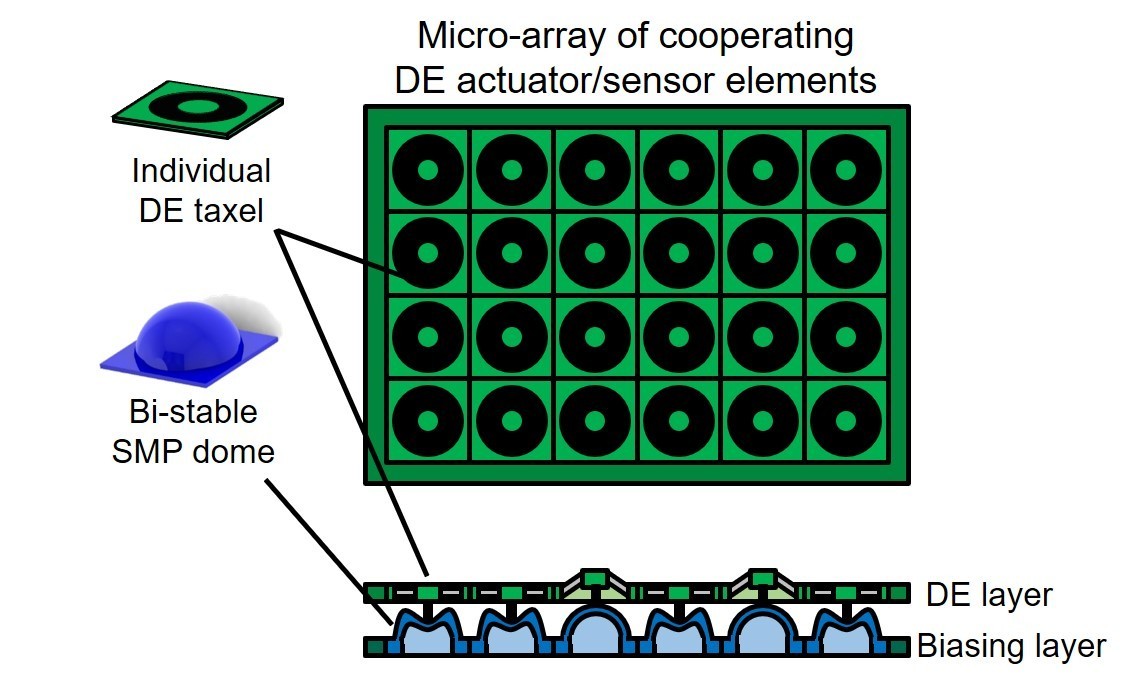
DFG SPP 2206 KOMMMA - Kooperative mehrstufige multistabile Mikroaktorsysteme
Das Ziel dieses Antrags ist die Entwicklung eines neuartigen, hoch-flexiblen Multisegment-Aktorsystems für große Hübe, welches aus mehreren Schichten dielektrischer Elastomer-(DE) Arrays und multistabilen Formgedächtnispolymeren (SMP) besteht. Neuartige Modellierungs- und Entwicklungstools werden entwickelt, welche sowohl die starke elektromagnetische Kopplung zwischen benachbarten Segmenten als auch die inhärenten Self-Sensing Fähigkeiten abbilden. Zum einen ermöglichen diese Tools eine systematische, anwendungsbasierte Auslegung, zum anderen dienen sie als Basis für sensorlose, verteilte Regelungsstrategien für eine gleichzeitige Aktuierung, welche im Rahmen der nächsten Phase des SPP entwickelt werden soll. Das Design von multistabilen Vorspannungselementen für SMP Folienschichten sind ein Ergebnis dieser Tools, als auch eine anwendungsorientierte Elektrodengeometrie der DE-Segmente. Die SMP-Schichten werden in einer geeigneten Form hergestellt, woraus eine energieeffiziente Aktuierung mit hohem Hub resultiert. Die Elektrodensegmente werden durch ein neuartiges Sputter-Verfahren aufgebracht, welches im Rahmen des Projektes entwickelt wird. Hierdurch wird ein hoher Hub und eine hohe Nachgiebigkeit ermöglicht, bei gleichzeitiger Aufrechterhaltung einer hohen Leitfähigkeit. Die Arbeit wird in drei Unterprojekte aufgeteilt, welche parallel von drei Gruppen bearbeitet werden. Zwei dieser Gruppen gehören der Fakultät Systems Engineering und Materialwissenschaften der Universität des Saarlandes an, während die dritte Gruppe an der Hochschule für Technik und Wirtschaft des Saarlandes (htw saar) ansässig ist. Die erste Gruppe (Rizzello) fokussiert sich auf die Entwicklung von Microscale-Modellen, um ein systematisches Design und Self-Sensing Strategien für Arrays miteinander agierender DE-Membranen zu ermöglichen. Zusätzlich werden kooperative Regelungsstrategien für zukünftige Projektphasen erarbeitet. Parallel hierzu entwickelt die zweite Gruppe (Seelecke) ein neues Auslegungskonzept und Strategien zur Miniaturisierung multistabiler verteilter Aktoren, als auch integrierte Elektronik zur Ansteuerung und Sensorik. Die dritte Gruppe (Schultes) beschäftigt sich mit der Materialauswahl und Herstellung dehnbarer, mikrostrukturierter Elektroden, welche für die lokale Aktuierung der segmentierten DE-Membranen notwendig sind. Die Expertise der drei Gruppen ist dahingehend aufeinander abgestimmt, dass verschiedene Aspekte der DE-Technologie abgedeckt werden, welche für das Erreichen des Ziels kooperativer Aktorsysteme notwendig sind. Hierduch wird der fachübergreifende Ansatz, welcher für den Erfolg einer Konzeptentwicklung erforderlich ist, dargestellt. Zudem stellt die gemeinsame Lage in Saarbrücken eine enge, synergetische Zusammenarbeit während der gesamten Laufzeit des Projektes sicher.
Laufzeit: 2019 - 2022 (36 Monate)
Projekt-PI: Jun.-Prof. Gianluca Rizzello (Universität des Saarlandes), Prof. Günter Schultes (HTW Saar), Prof. Stefan Seelecke (Universität des Saarlandes)
Projekt-Team: Sipontina Croce (Universität des Saarlandes), Jonas Hubertus (HTW Saar), Julian Neu (Universität des Saarlandes)
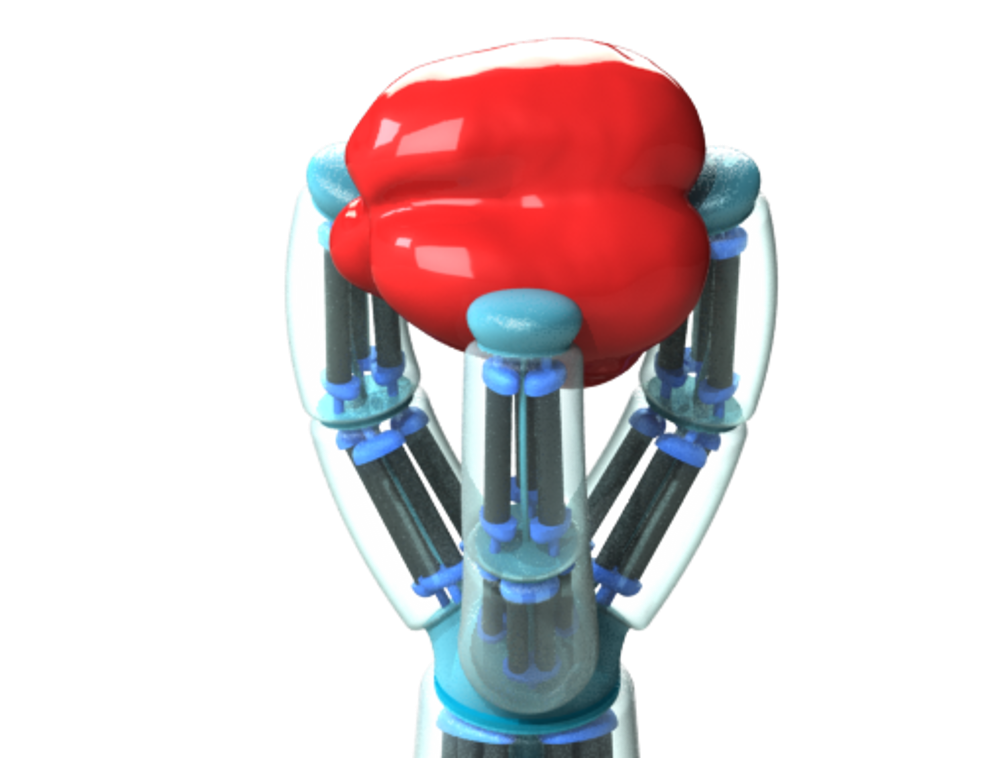
DFG SPP 2100 SMRS - Soft Material Robotic Systems
Ziel dieses Projekts ist die Entwicklung des ersten dreidimensionalen weichen Roboter-Tentakelarms mit künstlichen Muskeln aus dielektrischen Elastomeren (DE) als zentrale Aktor-/Sensorelemente, um in Zukunft hochflexible und sichere Anwenderinteraktion sowie weiche Endoskopie- oder Greifanwendungen zu ermöglichen. Diese Aufgabe wird gemeinsam von zwei Gruppen aus der Fachrichtung Systems Engineering der Universität des Saarlandes (Seelecke, Rizzello) bearbeitet, in Fortführung der bereits in der ersten SPP 2100-Förderperiode etablierten Zusammenarbeit. Während in Phase 1 der Fokus auf der Generierung eines grundlegenden Systemverständnisses über planare DE-Softroboterkonzepte lag, werden in Phase 2 die entwickelten Methoden und Algorithmen auf den Fall eines skalierbaren dreidimensionalen und hyperredundanten DE-Soft-Tentakelarms erweitert. Zu diesem Zweck wird die erste Gruppe (Seelecke) neuartige Auslegungs-, Herstellungs- und Integrationskonzepte für dreidimensionale DE-Soft-Tentakelarme untersuchen, während die zweite Gruppe (Rizzello) mathematische Modelle und auf Self-Sensing basierende Regelungsalgorithmen für ein umfassendes Systemverständnis und eine präzise Positionierung/Interaktion entwickeln wird. Wie in Phase 1 wird das Erreichen dieses Ziels einen stark interdisziplinären Ansatz erfordern, der durch die komplementäre Expertise der beiden Gruppen abgedeckt wird. Der gemeinsame Standort an der Universität des Saarlandes wird zudem eine enge und synergetische Zusammenarbeit während der gesamten Projektlaufzeit gewährleisten.
Laufzeit: 2022 - 2025 (36 Monate)
Projekt-PI: Jun.-Prof. Gianluca Rizzello (Universität des Saarlandes), Prof. Stefan Seelecke (Universität des Saarlandes)
Projekt-Team: Julian Kunze (Universität des Saarlandes), Giovanni Soleti (Universität des Saarlandes)
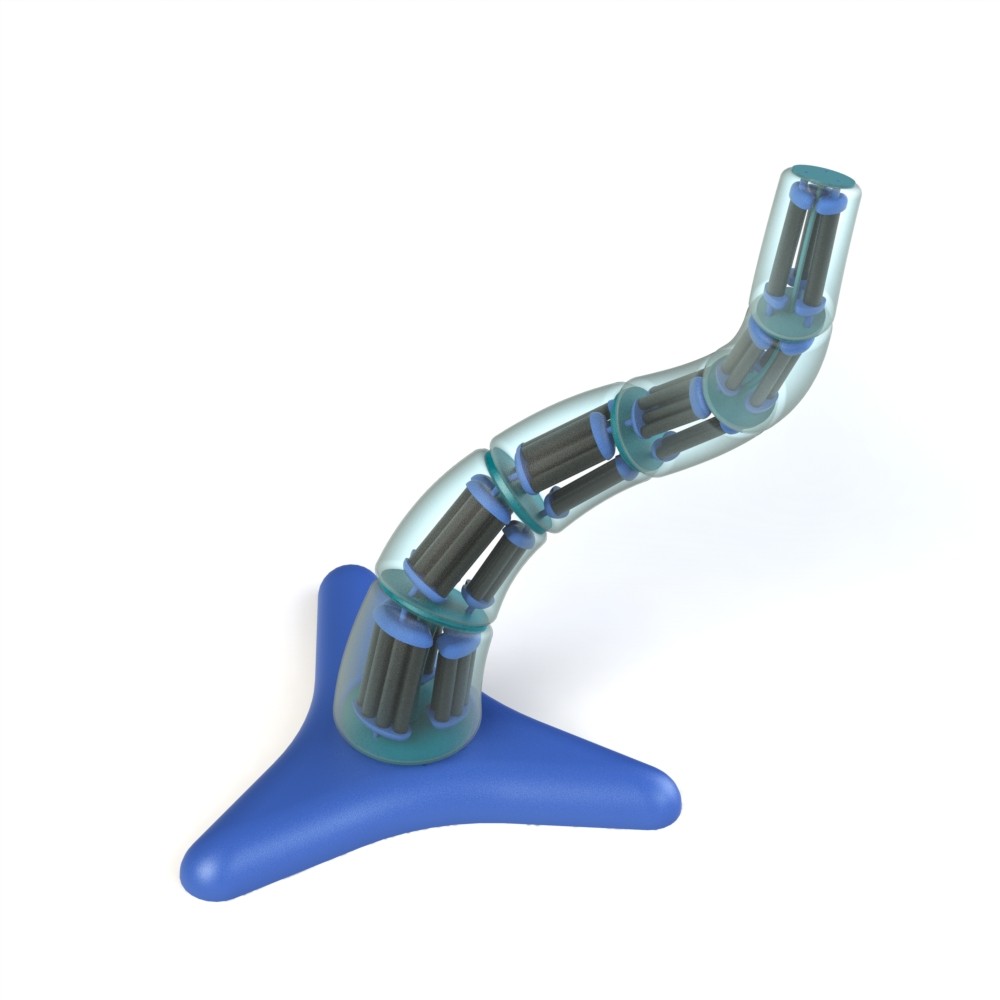
DFG SPP 2100 SMRS - Soft Material Robotic Systems
Das Ziel des vorliegenden Antrags ist die Entwicklung eines Aktor-/Sensor-Konzeptes auf Basis dielektrischer Elastomere (DE) für Soft-Robotiksysteme. Aufgrund ihrer intrinsischen Nachgiebigkeit und ihrer Fähigkeit, gleichzeitig als Aktor und Sensor zu arbeiten (Self-Sensing), stellen DEs eine ideale Ausgangsbasis für die Entwicklung neuartiger softer Maschinen dar, die sich mit Standardantrieben nicht realisieren lassen. Das hier vorgeschlagene Forschungsvorhaben gliedert sich in zwei Teilprojekte, die parallel von zwei Arbeitsgruppen aus den Fachrichtungen Systems Engineering und Materialwissenschaften an der Universität des Saarlandes durchgeführt werden.Dabei beschäftigt sich die erste Arbeitsgruppe (Seelecke) mit den Hardwareaspekten des Vorhabens, speziell mit Entwurf, Herstellung und systematischer experimenteller Validierung eines Mehrfreiheitsgrad-Aktor/Sensorsystems. Zur gleichen Zeit beschäftigt sich die zweite Arbeitsgruppe (Rizzello) mit der Entwicklung mathematischer Modelle, Ansteuerkonzepte sowie neuartiger Self-Sensing-Algorithmen für innovative Soft-Robotiksysteme.Die beiden Teilprojekte werden zum Schwerpunktprogramm SPP 2100 dabei speziell durch die Entwicklung eines modularen und skalierbaren, intelligenten Aktor-/Sensorsystems beitragen. Das entwickelte System wird seine Konfiguration und Nachgiebigkeit aktiv mit Hilfe von Self-Sensing basierten Techniken ansteuern bzw. regeln können und als Grundlage für die Entwicklung komplexerer Soft-Robotiksysteme, wie Tentakel oder Rüssel, dienen. Der multi-disziplinäre Charakter des Projektes stellt dabei durch seine ergänzende Kombination aus Hard- und Softwareaspekten sicher, das das Thema in seiner gesamten Breite behandelt wird.
Laufzeit: 2019 - 2022 (36 Monate)
Projekt-PI: Jun.-Prof. Gianluca Rizzello (Universität des Saarlandes), Prof. Stefan Seelecke (Universität des Saarlandes)
Projekt-Team: Matthias Baltes (Universität des Saarlandes), Julian Kunze (Universität des Saarlandes), Johannes Prechtl (Universität des Saarlandes)