Bioinspirierte Roboter
Entwicklung eines autonomen bioinspirierten Roboters
Sommersemester 2011
Kurzfassung
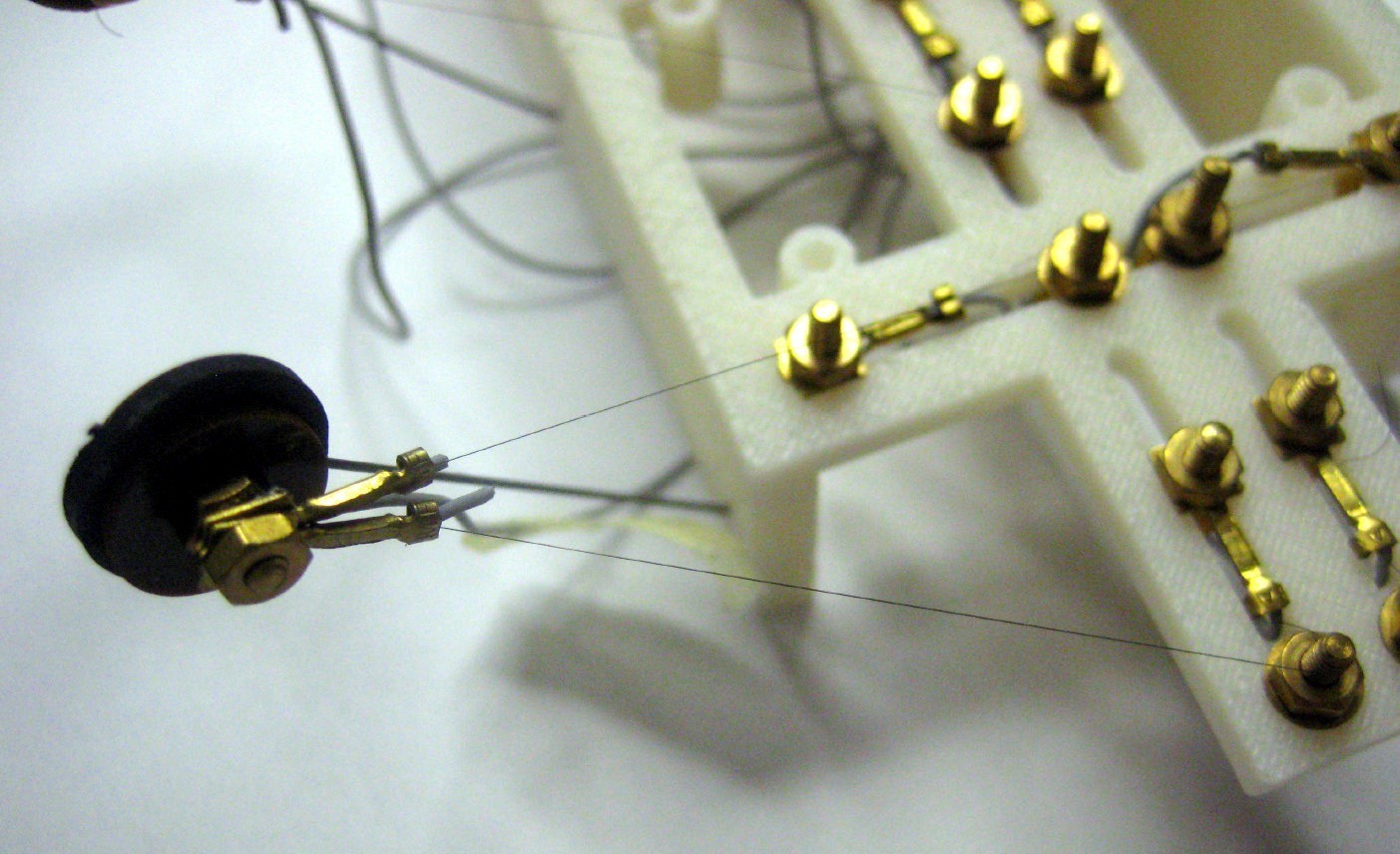
Das Ziel des Projekts war die Entwicklung einer auf Formgedächtnislegierungen („Metallischen Muskeln“) basierenden Roboterplattform mit integrierter Steuerungshardware, Energieversorgung und drahtloser Datenübertragung. Formgedächtnislegierungen sind Metalle, die durch temperaturabhängige Wandlung ihres Atomgitters ihre Form ändern können. Im Projekt wurden Drähte verwendet, deren geometrische Dimension ungefähr der eines menschlichen Haars entspricht und die eine Längenänderung von ca. 5% erreichen. Im Gegensatz zu konventionellen Aktoren benötigen diese „Muskeln“ keine Getriebe oder Führungen.
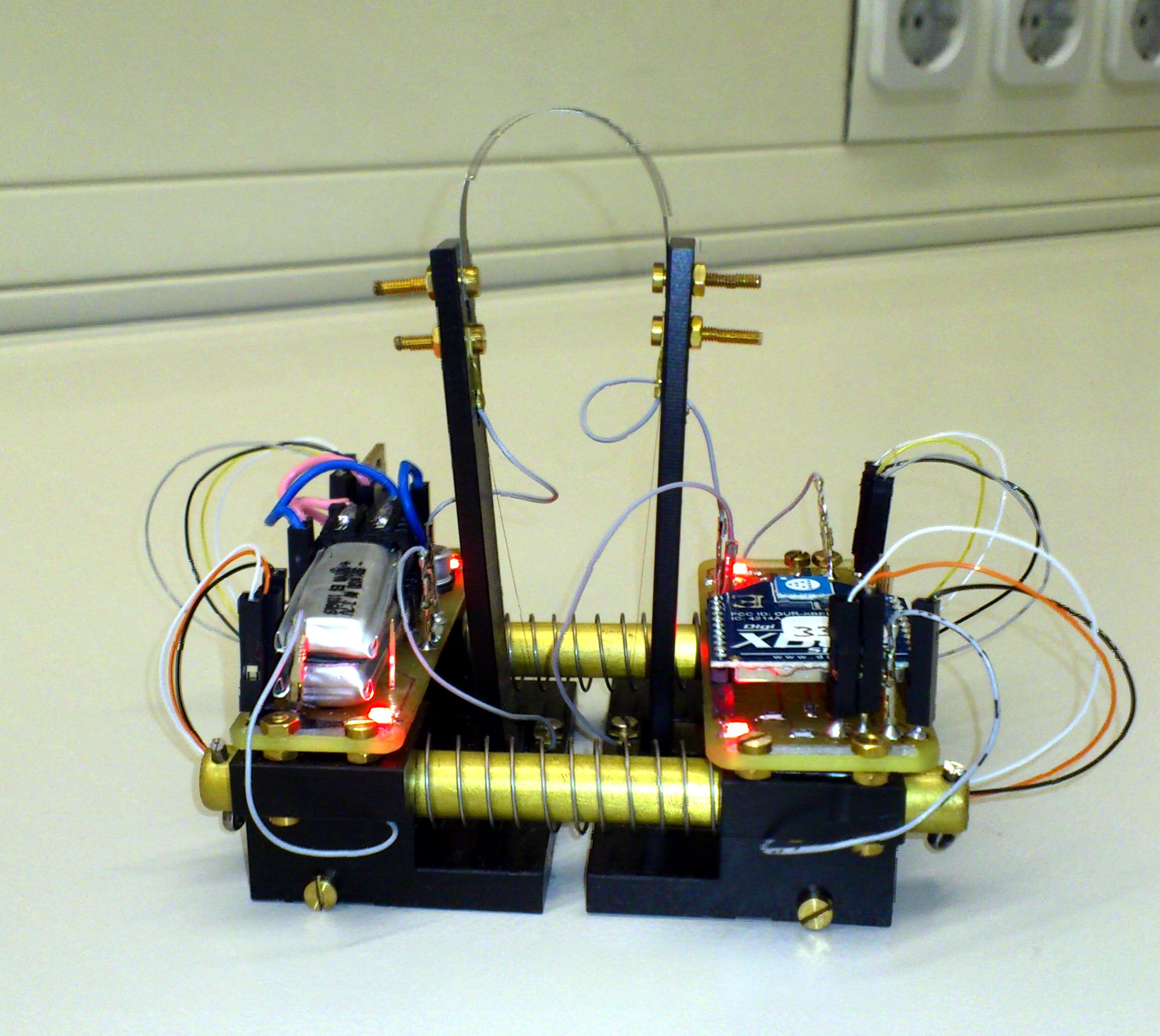
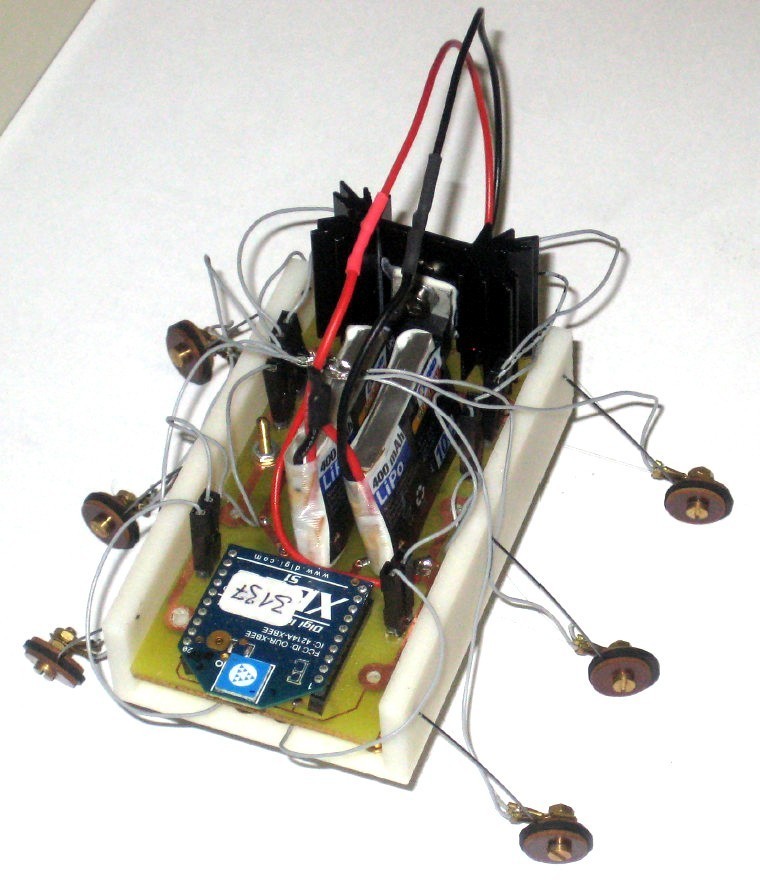
Im Rahmen des Projekts wurden von zwei Gruppen zwei Roboter entwickelt und realisiert, die auf unterschiedlichen Konzepten der Fortbewegung beruhen. Einer orientiert sich am Bewegungsablauf eines Käfers, der andere an dem einer Schnecke. Für beide Roboter wurde zunächst theoretisch gezeigt, dass der gewünschte Bewegungsablauf mit der vorgeschlagenen Konstruktion und den vorhandenen „Muskeln“ möglich ist. Nebem dem mechanischen Aufbau wurden jeweils Platinen mit Mikrocontroller, Leistungselektronik und Kommunikationsschnittstellen entwickelt, die einen autonomen Betrieb der Roboter ermöglichen. Schließlich wurde die Steuerung der „Muskeln“ im Mikroprozessor implementiert und durch praktische Versuche sukzessive optimiert. Beide Roboter waren zu Projektende fortbewegungsfähig.
Die Projektgruppen wurden als beste ihres Jahrgangs mit einem Preis ausgezeichnet.
Die lauffähigen Roboter
Teilnehmer
Patrick Becker
Marc Janocha
Sebastian Meisinger
Marc Regitz
Mohannad Rei
Sebastian Scheid
Roman Waletzke
Betreuer
Prof. Dr.-Ing. habil. J. Rudolph
Prof. Dr.-Ing. habil. St. Seelecke
M.Sc. S. Furst (LUA)
Dipl.-Ing. L. Kiltz
Dipl.-Ing. M. Konz