Selbstbalancierender Roboter
Konstruktion, Modellierung, Reglerentwurf, Simulation und Inbetriebnahme eines selbst-balancierenden Roboters
Sommersemester 2012
Kurzfassung
Im Rahmen dieses Mechatronischen Projekts wurden grundlegende Vorarbeiten zum Bau eines auf einem Ball balancierenden Roboters (Ball-Roboter) geleistet. Das Projekt wurde von zwei Gruppen bearbeitet.
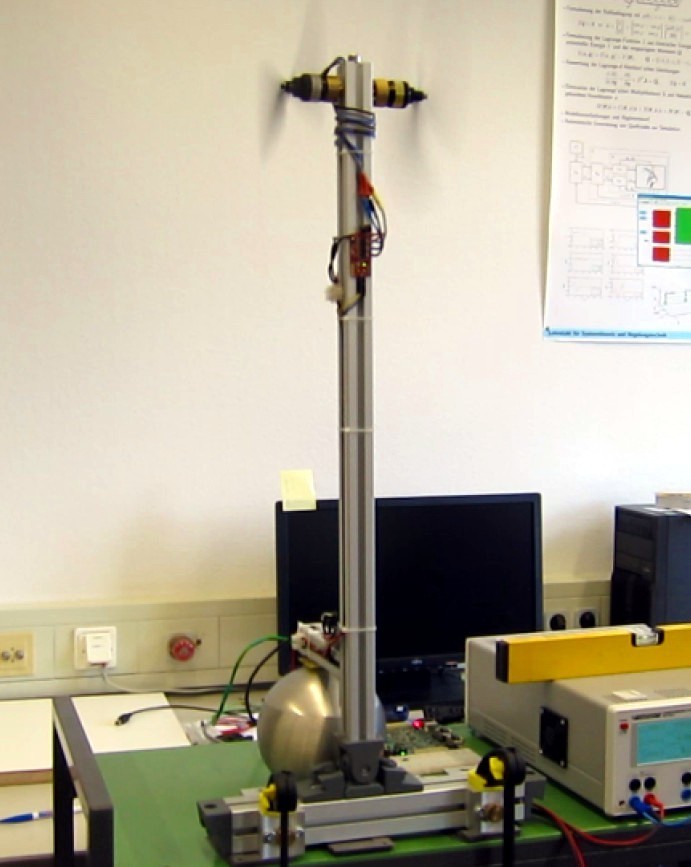
Durch die erste Gruppe wurde ein von zwei Propellern aktuiertes inverses Pendel aufgebaut. An dem Aufbau wurden ein Inertialsensor und ein Maus-Sensor angebracht, wie er in sogenannten Gaming-Mäusen vorkommt, um diese spätere Sensorik für den Ball-Roboter testen zu können. Unter Verwendung des Inertialsensors wurde die Genauigkeit des Maus-Sensors, der später die Bewegung des Balls erfassen soll, quantifiziert. Es wurden erste Untersuchungen zur Dynamik der Propeller vorgenommen. Ein wesentlicher Teil des Projekts bestand zudem in der Hardeware- und Softwareentwicklung.
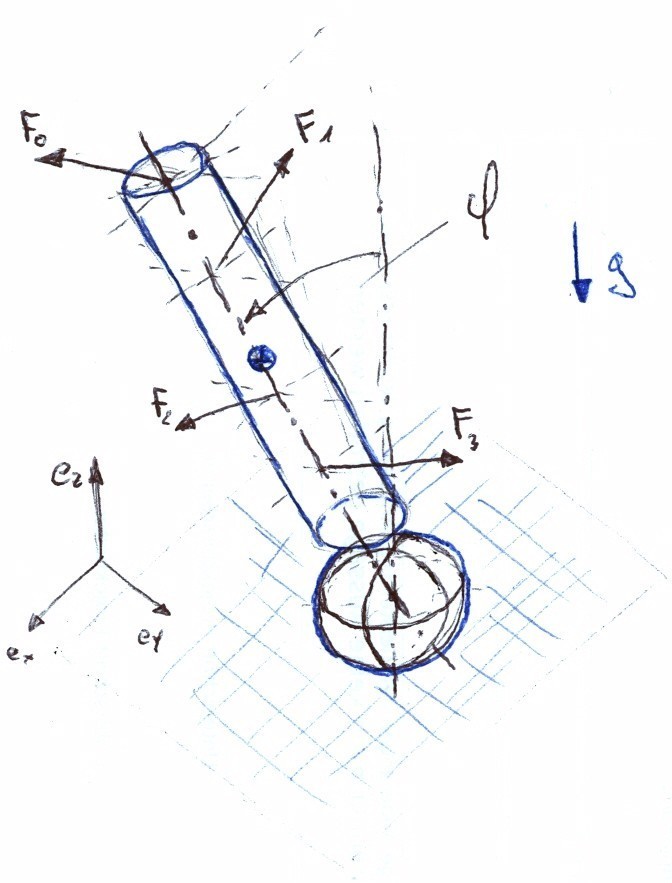
Die zweite Gruppe beschäftigte sich hauptsächlich mit der Modellbildung des Ball-Roboters. Es wurden die Bewegungsgleichungen des räumlichen, nichtholonomen mechanischen Systems hergeleitet und analysiert. Des Weiteren wurden erste Ansätze zur Regelung beschrieben und die entworfenen Regler simulativ validiert.
Die Projektgruppen wurden als beste ihres Jahrgangs mit einem Preis ausgezeichnet. Das Projekt wird im Rahmen eines Projektpraktikums weitergeführt.
Vom Entwurf zur Realisierung
Teilnehmer
Daniel Bauer
Daniel Bruch
Michael Collisi
Sebastian Gratz-Kelly
Klaus Schuhmacher
Alexander Sema
Simon Werner
Betreuer
Prof. Dr.-Ing. habil. J. Rudolph
M.Sc. D. Kastelan
Dipl.-Ing. L. Kiltz
Dipl.-Ing. M. Konz