Autonomes Einrad
Entwicklung eines autonomen Einrads
Wintersemester 2009/10
Kurzfassung
Ein autonomer Roboter, welcher einen menschlichen Einradfahrer nachahmt, stellt eine interessante regelungstechnische Herausforderung dar. Ohne geeigneten Regler kann das Einrad in alle Richtungen umkippen, da sich der Massenmittelpunkt oberhalb der Rotationsachsen des Rades befindet. Ziel dieses Projektpraktikums war die Entwicklung eines derartigen Einradroboters, welcher von selbst balanciert und dabei auf einer Schiene vor- und zurückfahren kann.
Hierzu wurden verschiedene konstruktive Varianten mit unterschiedlichen Antriebskonzepten erarbeitet, von denen eines zur weiteren Umsetzung ausgewählt wurde. Es wurden geeignete Komponenten (Inertialsensorik, elektrische Antriebe, Leistungselektroniken, Echtzeithardware) zur Realisierung des ausgewählten Entwurfs recherchiert und verglichen. Die besondere Herausforderung bei einem derartigen System besteht darin, dass die Komponenten, insbesondere die elektrischen Antriebe, sowie deren Positionierung, eine Rückwirkung auf die erforderlichen Stellgrößen und somit wiederum auf die Eigenschaften der Komponenten selbst haben.
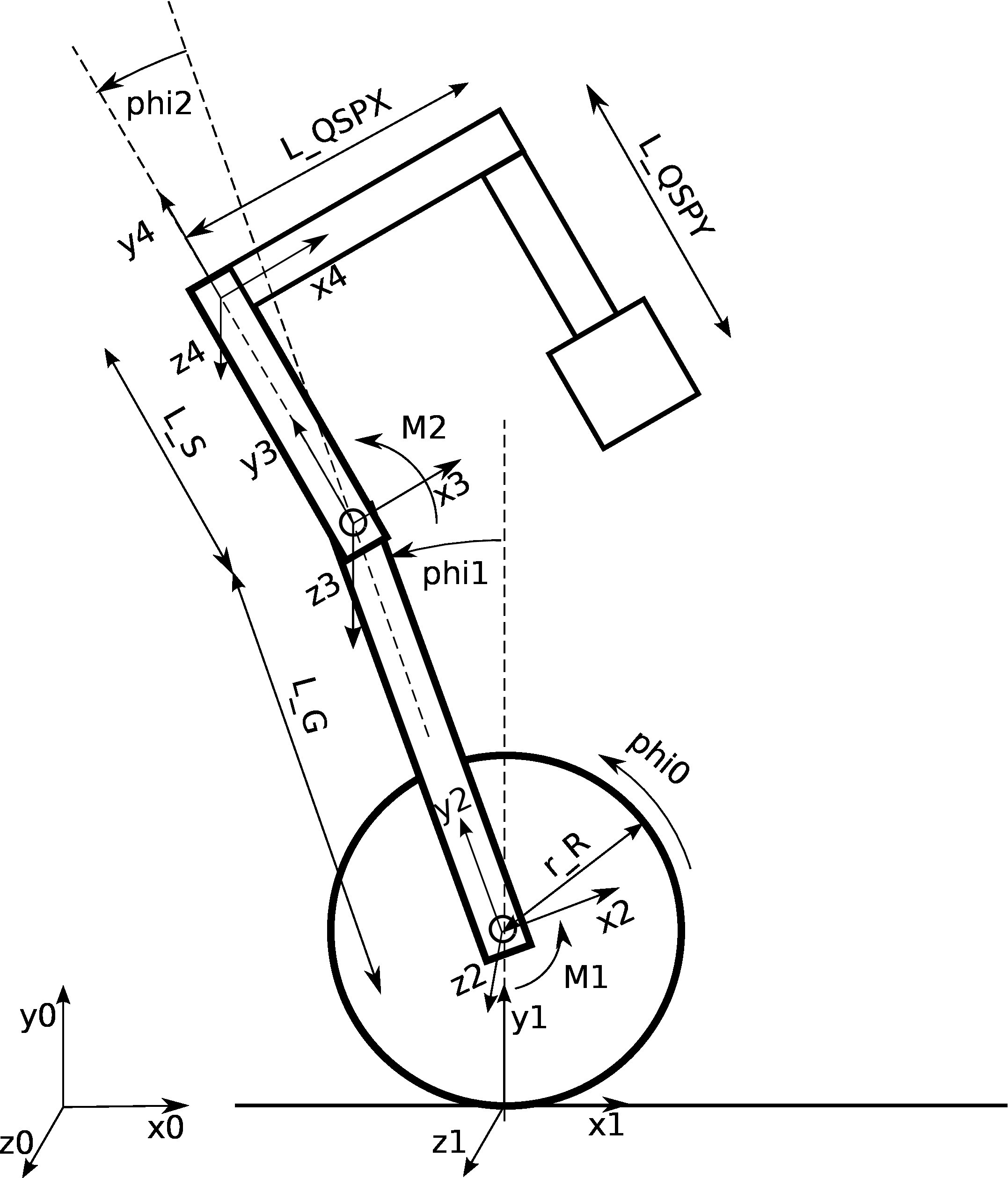
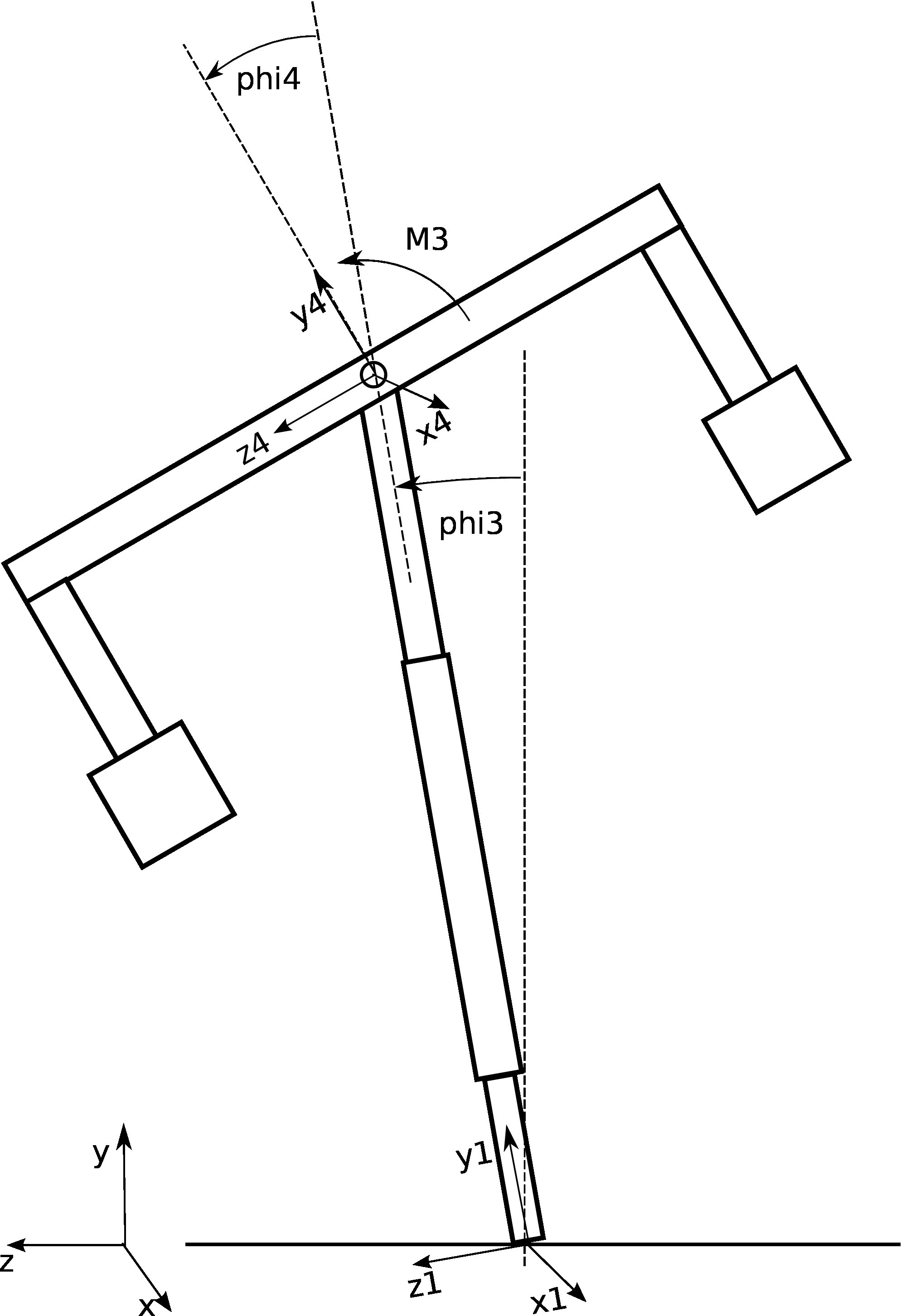
Es wurde ein mathematisches Modell des Einrads inklusive der Aktuatordynamik hergeleitet und ein Trajektorienfolgeregler mit Trajektorienplanung entworfen. Anhand von Simulationen erfolgte die Validierung der Konstruktion mit den gewählten Komponenten.
Entwurfsskizzen für das Einrad
Teilnehmer
Joseph Al Ahmar
Adrien Le Rat
Daniel Merl
Johannes Ullrich
Yann Weyland
Betreuer
Prof. Dr.-Ing. habil. J. Rudolph
Dipl.-Ing. M. Bachmayer
Dipl.-Ing. L. Kiltz