Propellergetriebener Ballbot
Regelung und Realisierung eines propellergetriebenen Ballbots
Wintersemester 2012/13
Kurzfassung
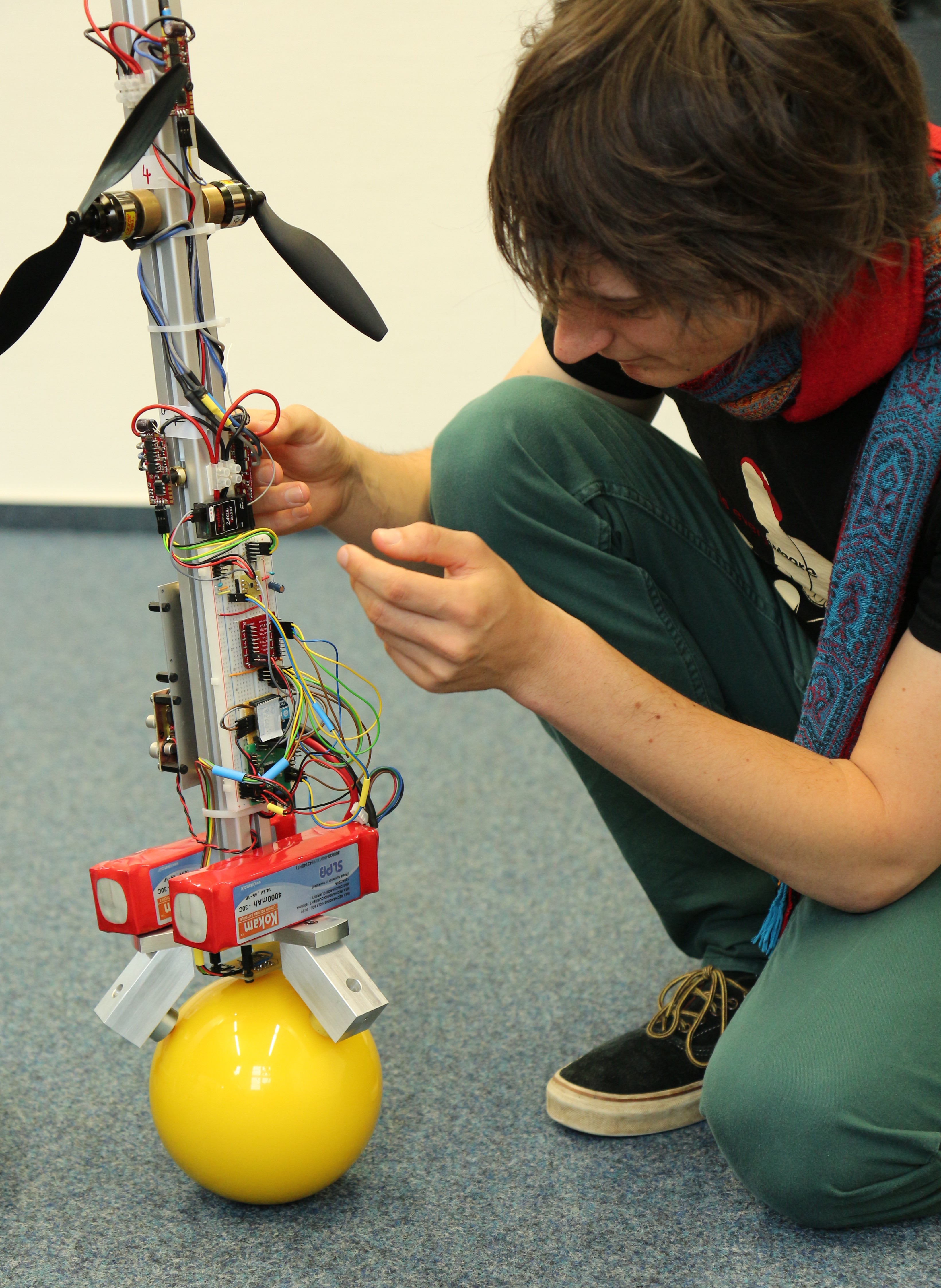
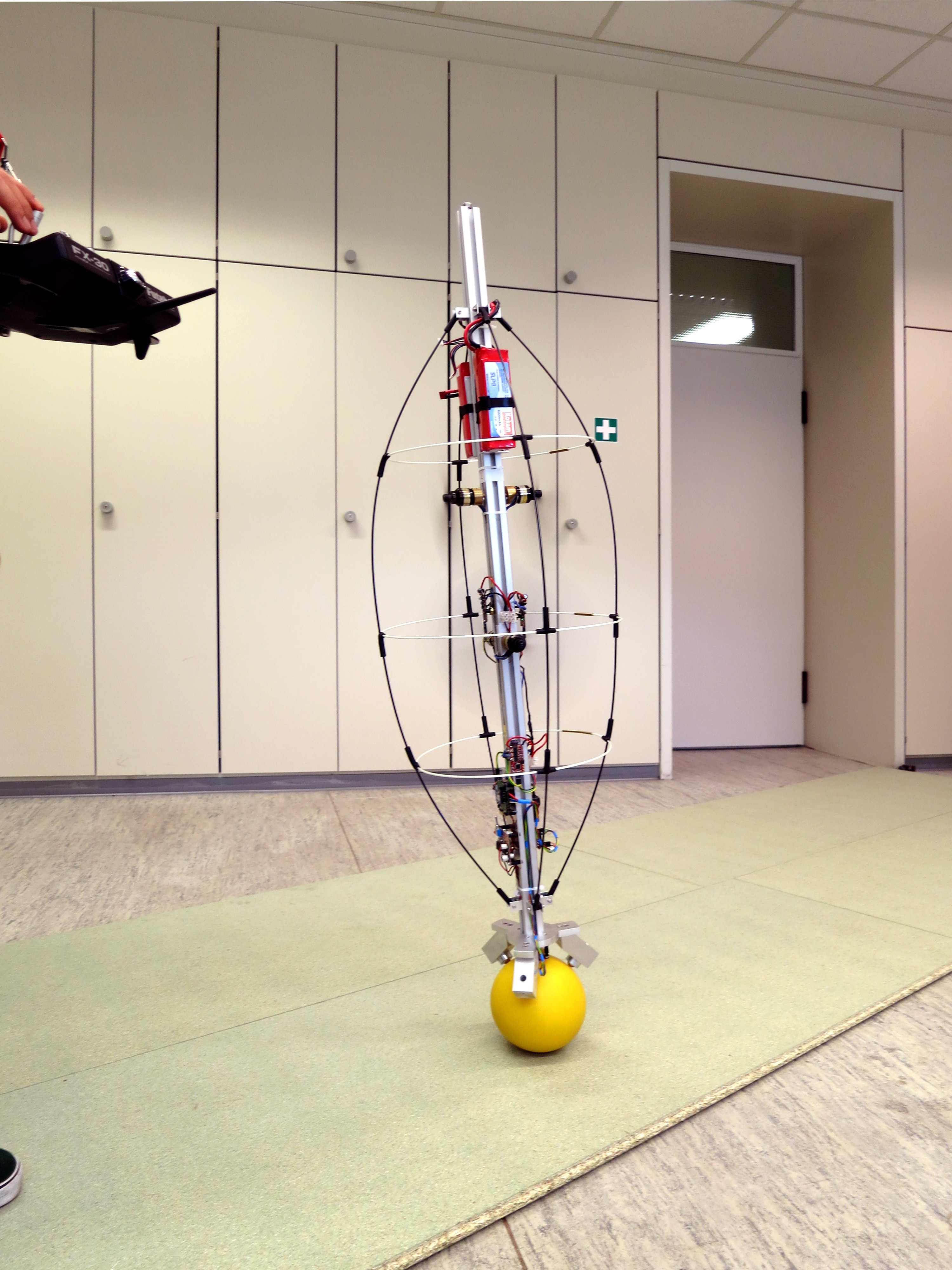
Aufbauend auf dem Mechatronischen Projekt „Konstruktion, Modellierung, Reglerentwurf, Simulation und Inbetriebnahme eines selbst-balancierenden Roboters“ wurde ein Roboter realisiert, der mit Hilfe von Propellern auf einem Ball balanciert und sich auf einem ebenen Untergrund gezielt bewegen kann. Für diesen Roboter hat sich die Bezeichnung "propellergetriebener Ballbot" etabliert.
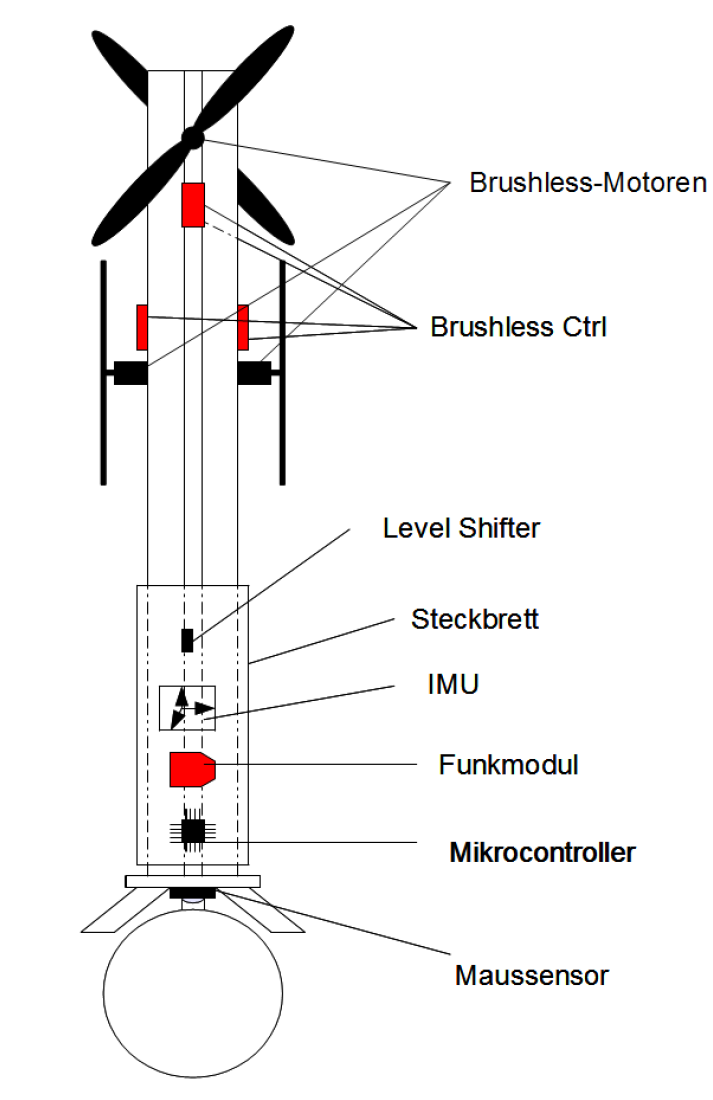
Der mechanische Aufbau des Roboters wurde konstruiert und gefertigt. Als besondere Herausforderung ergab sich hierbei die möglichst reibungsarme Lagerung zwischen Ball und Roboter-Körper. Aufgrund der Erfahrungen aus dem vorangegangenen Projekt wurde eine systematische Identifikation des Modells der Propeller durchgeführt. Außerdem wurde ein leistungsfähigerer Mikroprozessor in die Hardware-Struktur integriert.
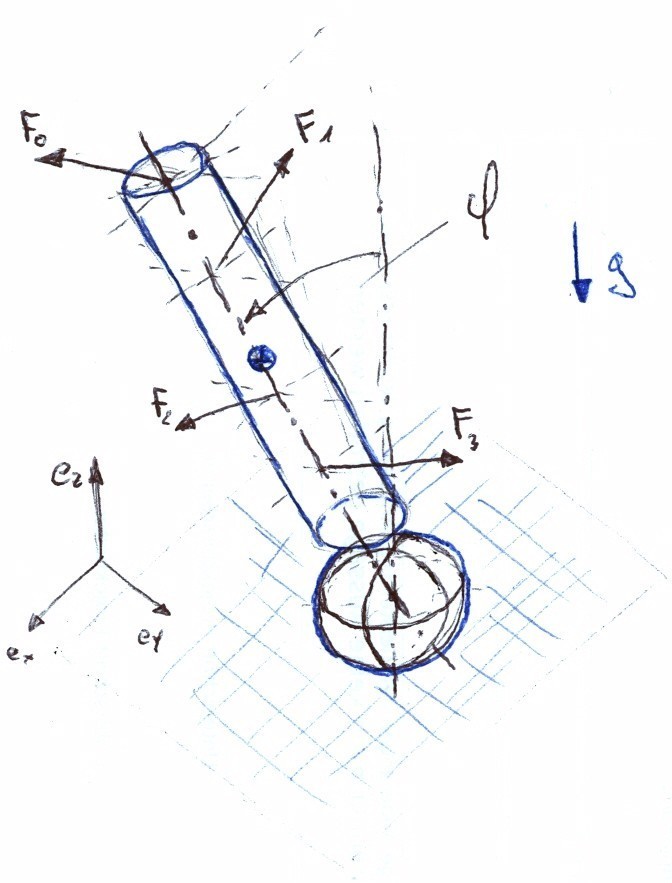
Das aus dem Mechatronischen Projekt vorliegende nichtlineare Starrkörpermodell wurde für den Reglerentwurf linearisiert. Für das resultierende lineare Modell wurden mit den Methoden der "Systemtheorie und Regelungstechnik 2" eine Folgeregelung für die translatorischen Geschwindigkeiten des Robotes entworfen und die entsprechenden Algorithmen auf einem Mikroprozessor implementiert. Der Ballbot wird durch eine handelsübliche Funkfernsteuerung bedient. Dabei werden die Sollgeschwindigkeiten vorgegeben und der Regler sorgt dafür, dass der Roboter diesem Wunsch folgt.
Vom Entwurf zur Realisierung
Teilnehmer
Daniel Bauer
Sebastian Gratz-Kelly
Alexander Sema
Betreuer
Prof. Dr.-Ing. habil. J. Rudolph
Dipl.-Ing. M. Konz