DA Matthias Konz
Diplomarbeit Matthias Konz, 2010
Konstruktion, Modellierung, Reglerentwurf und Inbetriebnahme eines autonomen Einrads
Auszeichnung
VDE-Preis 2011 des VDE-Bezirksvereins Saar (Urkunde)
Kurzfassung
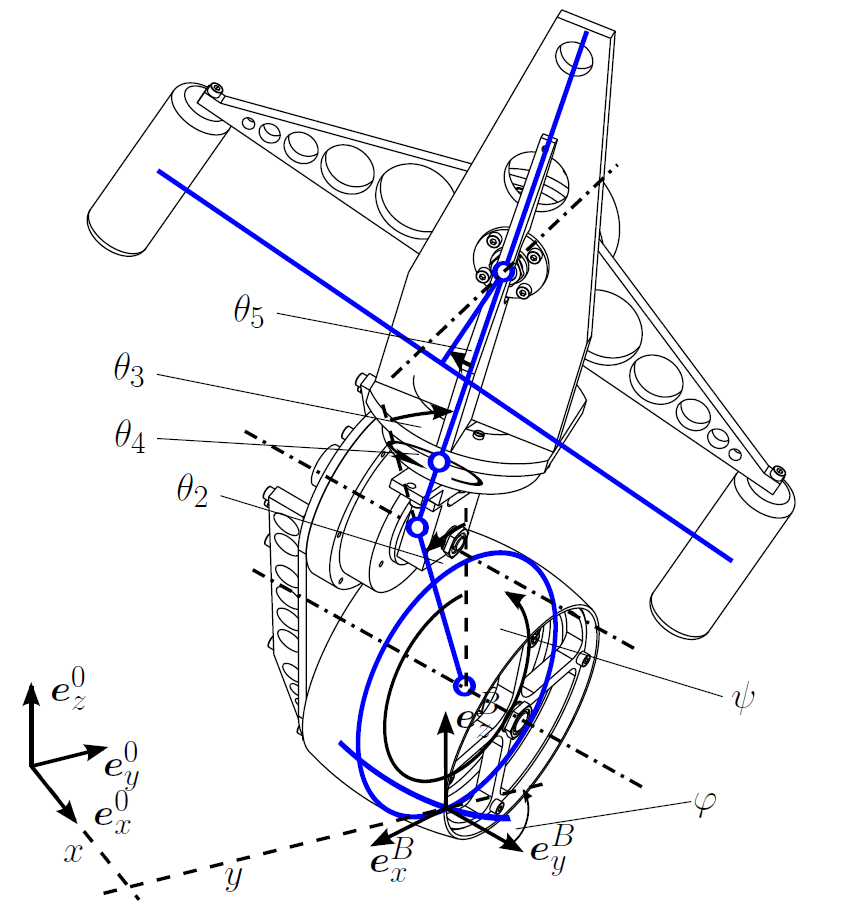
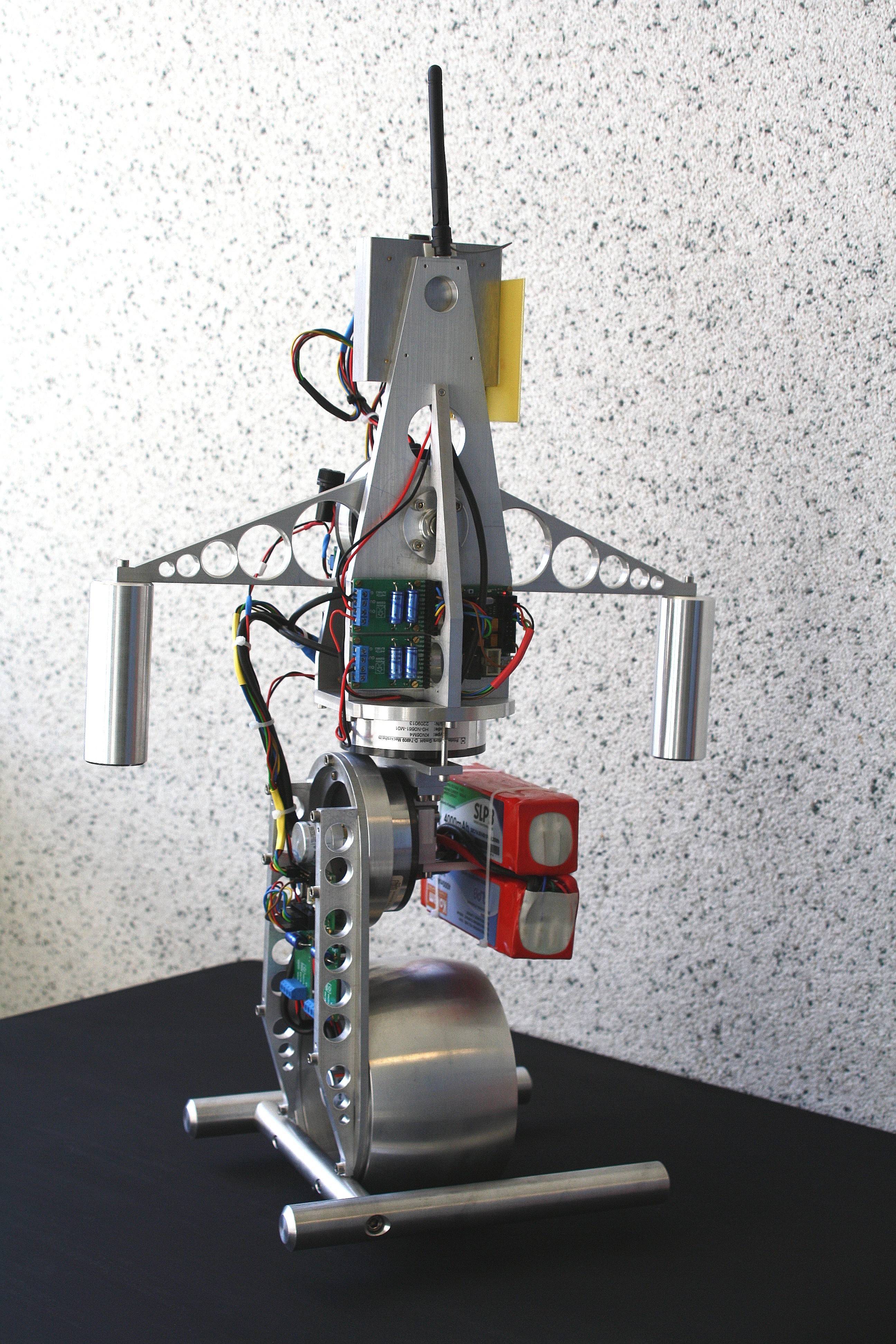
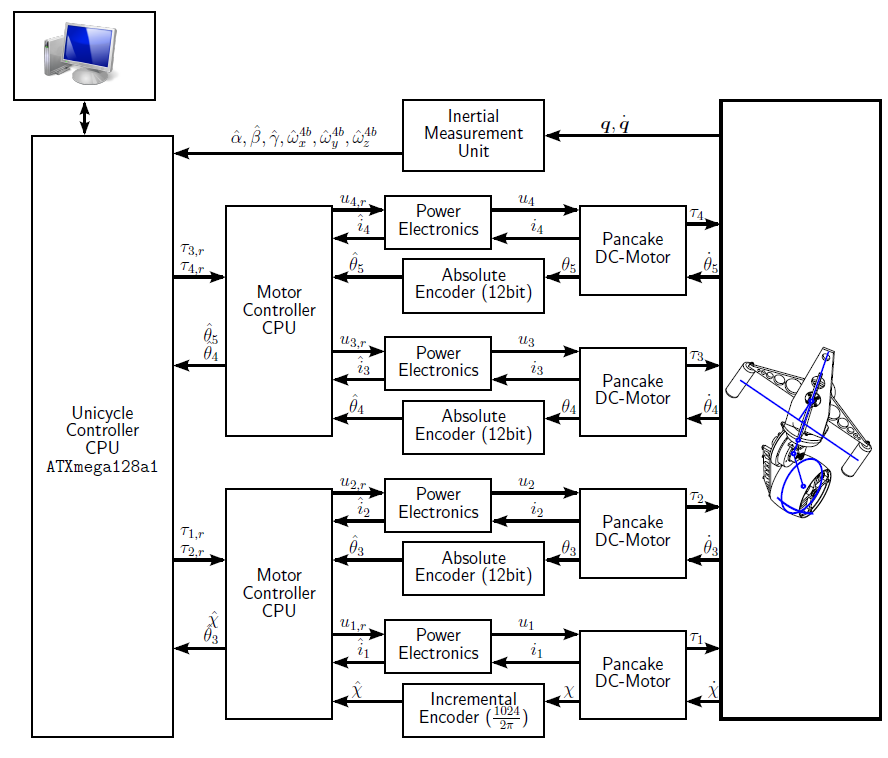
In der Diplomarbeit werden die Konstruktion eines Einrads und die theoretischen Grundlagen für dessen autonomen Betrieb diskutiert. Im Gegensatz zu bereits existierenden Realisierungen von Einrad-Robotern orientiert sich die hier erarbeitete Konstruktion in Gelenkanordung und Massenverteilung an einem humanoiden Einrad-Fahrer. Die Gelenke werden durch Gleichstrommotoren aktuiert, welche mit Pulsweitenmodulation über entsprechende Leistungselektronik gesteuert werden. Als Sensorik kommen Inkrementalgeber an den Gelenken, sowie ein Inertialmesssystem zum Einsatz. Die Implementierung von Steuerung und Regelung wird durch einen auf dem Aufbau platzierten Mikrocontroller realisiert, womit der Roboter als autonom angesehen werden kann.
Die Modellbildung des Einrads umfasst die Herleitung und Analyse der Bewegungsgleichungen des mechanischen Aufbaus, wobei das Rollen ohne Gleiten des Rads ein klassisches Beispiel für nichtholonome Mechanik ist. Zum Modell gehören dabei auch die Beziehungen für Stell- und Messgrößen.
Da es sich beim aufrechten Stehen des Einrads um eine instabile Ruhelage handelt, wird eine Regelung erforderlich. Das hergeleitete Modell ist nicht vollständig direkt gesteuert und wahrscheinlich auch nicht differentiell flach, weshalb etablierte Standardverfahren der Regelungstechnik kaum anwendbar sind. Zur Stabilisierung der Ruhelage wurde daher ein Regler basierend auf einer Approximation des Modells um diese Ruhelage entworfen. Durch Simulationen konnte gezeigt werden, dass diese Regelung auch das nicht approximierte Modell in der Nähe der Ruhelage stabilisiert.
Eine deutlich anspruchsvollere Aufgabe als die Stabilisierung der Ruhelage ist das gezielte Fahren von Kurven. Die Arbeit schließt mit einem theoretischen Ansatz zur Steuerung der Bahn des Einrads auf dem Untergrund. Dieser basiert auf der Flachheit des approximierten (aber weiterhin nichtlinearen) Modells.
Konstruktion und Modellbildung

Simulation und Hardwarerealisierung
Betreuer
Prof. Dr.-Ing. habil. J. Rudolph
Dipl.-Ing. L. Kiltz