Transport von Lasten mit Trikoptern
Regelung von Trikoptern beim gemeinsamen Transport von an Seilen aufgehängten Lasten
Beschreibung
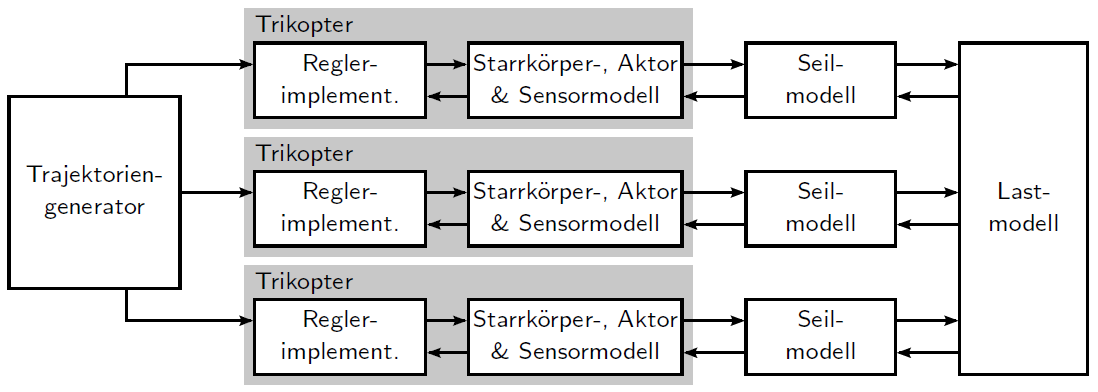
Im Rahmen des Projekts wurde der Transport von an schweren Seilen aufgehängten Lasten durch Trikopter theoretisch untersucht und experimentell validiert. Diese Anwendung dient als ein Beispiel für über dynamische Randbedingungen (gewöhnliche Differentialgleichungen) gekoppelte, örtlich verteilte Systeme (partielle Differentialgleichungen), für die Folgeregelungen zu realisieren sind. Neu gegenüber dem aktuellen Stand der Forschung ist die Verwendung von Trikoptern mit sechs unabhängigen Antrieben, sowie die unvermeidbare Berücksichtigung der örtlichen Masseverteilung der Seile. Die für dieses Projekt entwickelten Trikopter bieten gegenüber klassischen Quadkoptern neue Bewegungsmöglichkeiten (z. B. eine horizontale Bewegung ohne seitliches Kippen), welche die Bewegung der Seile wesentlich erleichtern. Für die Positions- und Orientierungsregelung der Trikopter wurden energiebasierte Methoden der Modellierung und nichtlinearen Regelung weiterentwickelt. Bei deren praktischer Umsetzung waren allerdings zahlreiche Herausforderungen zu bewältigen, wie z. B. die Verzögerung und niedrige Abtastrate der Positionsmessung sowie die Eigendynamik der Propeller und deren Schwenkmechanismen. Insgesamt wurde ein Flugroboter realisiert, dessen Agilität und Genauigkeit im Lichte des aktuellen Forschungsstandes ihresgleichen suchen.
Die besondere Herausforderung beim Lasttransport sind die verwendeten schweren Seile mit nicht zu vernachlässigender Masseverteilung, die als unendlichdimensionale Systeme modelliert werden. Trotzdem konnten in Hinblick auf den Lasttransport bessere Ergebnisse erzielt werden als in vergleichbaren Arbeiten, in denen sogar die Masse der Seile gegenüber der Last vernachlässigt werden kann. Aktuelle regelungstechnische Methoden, die auf eine frühe endlichdimensionale Approximation verzichten, wurden auf die oben beschriebene Klasse hybrider Systeme – im Sinne über gewöhnliche Differentialgleichungen gekoppelter partieller Differentialgleichungen – angewandt. Im Ergebnis zeigt sich, dass diese Methoden für eine praktische Realisierung auch schneller mechanischer Systeme durchaus geeignet sind und damit leistungsfähige Regelungen ermöglichen. Der Lasttransport wurde experimentell mit mehreren Trikoptern und unterschiedlichen Lasten durchgeführt. Diese Experimente zeigen, dass eine hochdynamische Bewegung mit einer hohen Genauigkeit möglich ist. Der Folgefehler der Lastbewegung liegt in einem ähnlichen Bereich wie jener der Trikopter, was den Nutzen des verwendeten, einfachen Regelungskonzepts unterstreicht, welches ohne eine Rekonstruktion der Seilprofile auskommt. Somit hat sich im vorliegenden Fall die Verwendung von Beobachtern zu diesem Zwecke nicht als erforderlich erwiesen, dieser kann jedoch künftig beispielsweise im Rahmen einer Kompensation externer Störungen zum Tragen kommen. Eine im Projekt entwickelte Theorie der Modellierung mechanischer Systeme unter Verwendung redundanter Koordinaten konnte auf die Trikopter erfolgreich angewandt werden. Auch die Regelungsalgorithmen basieren auf Ansätzen, in denen das Zielsystem entsprechend parametriert wird. Eine Übertragung auf unendlichdimensionale Systeme – insbesondere die betrachteten schweren Seile – war, bisher die Modellierung betreffend, ebenfalls möglich. Dieser recht weittragende Beitrag zur Mechanik war bei Beantragung des Projekts nicht zu erwarten gewesen.

Weitere Videos

Studentische Beiträge
Beiträge zur Modellbildung, zum Steuerungs- und zum Reglerentwurf für eine an Seilen aufgehängte Last unter Verwendung verteiltparametrischer Modelle (Master-Arbeit 2017)
Abdurrahman Irscheid
Coordinated Multicopter Load Transport(Sommer 2017)
Clark Zha (Rice University, USA)
Modellbasierte Regelung und Inbetriebnahme eines Trikopters mit angehängter Last (Bachelor-Arbeit 2016)
Alexander Gutte
Communication System for Multicopter Coordination(Sommer 2015)
Russell Buchanan (McGill University, Kanada)
Veröffentlichungen
A. Irscheid, M. Konz, J. Rudolph, A Flatness-Based Approach to the Control of Distributed Parameter Systems Applied to Load Transportation with Heavy Ropes, in: Y. Kondratenko, A. Chikrii, V. Gubarev, J. Kacprzyk (EDS.), Advanced Control Techniques in Complex Engineering Systems: Theory and Applications. Studies in Systems, Decision and Control, Vol. 203. Springer, pp. 279-294, 2019. DOI
A. Irscheid, D. Gerbet, J. Rudolph, Flatness‐based control of a rigid body carried by multiple heavy ropes, PAMM - Proc. Appl. Math. Mech., 18: e201800438, 2018. DOI
D.Gerbet, J. Rudolph, Redundant coordinates for modeling a heavy rop, at - Automatisierungstechnik, Band 66, Heft 7, Seiten 536–547, 2018. DOI.
D. Gerbet, J. Rudolph, Modeling a heavy rope using redundant coordiantes, PAMM - Proc. in Appl. Mathem. and Mechanics, 17, 795-796, 2017. DOI