Transport of Loads via Tricopters
Description
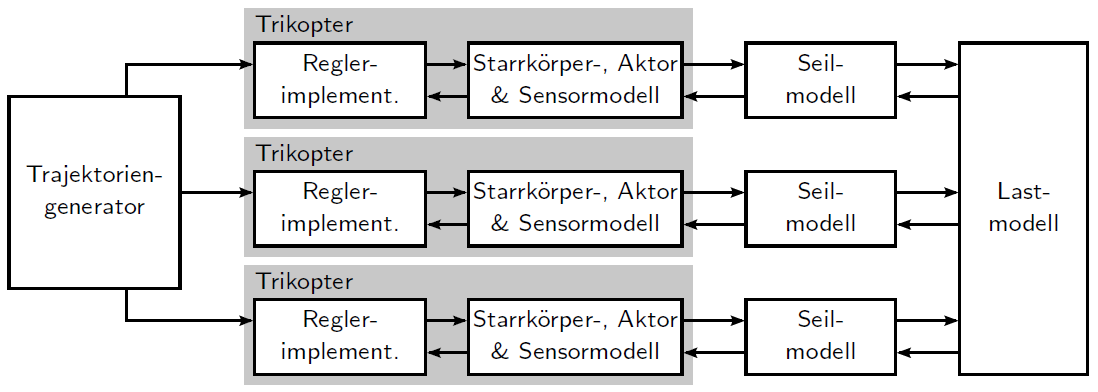
The project considers the control of small unmanned aerial vehicles, especially so-called tricopters, cooperating to transport a load attached to them via ropes. Due to the mechanic coupling between the aerial vehicles and the load itself, the challenges arising from this set-up differ significantly from those already extensively studied in the context of the control of individually acting and uncoupled aircrafts. While a great number of technological problems will have to be overcome as the project progresses, the main objective is to develop new model-based control strategies for the aforementioned cooperative transport.
The mathematical model of the control process involves both nonlinear ordinary differential equations, describing the rigid body dynamics of the aerial vehicles, the load, and the aerodynamics of the rotors, and partial differential equations modeling the suspension ropes. Especially the latter is a novel view as published research has been limited to considering the links between aircrafts and load as rigid, until now.
The transition of a load between predefined positions along a specified trajectory avoiding obstacles is a classical example of a tracking control task. Flatness based methods have proven to be very useful in the solution of such tasks for nonlinear systems of finite as well as infinite dimension. Therefore, theses methods will have to be develop further in light of this challenging and technologically significant control problem.


Beiträge zur Modellbildung, zum Steuerungs- und zum Reglerentwurf für eine an Seilen aufgehängte Last unter Verwendung verteiltparametrischer Modelle (Master-Arbeit 2017)
Abdurrahman Irscheid
Coordinated Multicopter Load Transport(Sommer 2017)
Clark Zha (Rice University, USA)
Modellbasierte Regelung und Inbetriebnahme eines Trikopters mit angehängter Last (Bachelor-Arbeit 2016)
Alexander Gutte
Communication System for Multicopter Coordination(Sommer 2015)
Russell Buchanan (McGill University, Kanada)
A. Irscheid, M. Konz, J. Rudolph, A Flatness-Based Approach to the Control of Distributed Parameter Systems Applied to Load Transportation with Heavy Ropes, in: Y. Kondratenko, A. Chikrii, V. Gubarev, J. Kacprzyk (EDS.), Advanced Control Techniques in Complex Engineering Systems: Theory and Applications. Studies in Systems, Decision and Control, Vol. 203. Springer, pp. 279-294, 2019. DOI
A. Irscheid, D. Gerbet, J. Rudolph, Flatness‐based control of a rigid body carried by multiple heavy ropes, PAMM - Proc. Appl. Math. Mech., 18: e201800438, 2018. DOI
D.Gerbet, J. Rudolph, Redundant coordinates for modeling a heavy rop, at - Automatisierungstechnik, Band 66, Heft 7, Seiten 536–547, 2018. DOI.
D. Gerbet, J. Rudolph, Modeling a heavy rope using redundant coordiantes, PAMM - Proc. in Appl. Mathem. and Mechanics, 17, 795-796, 2017. DOI