Trikopter

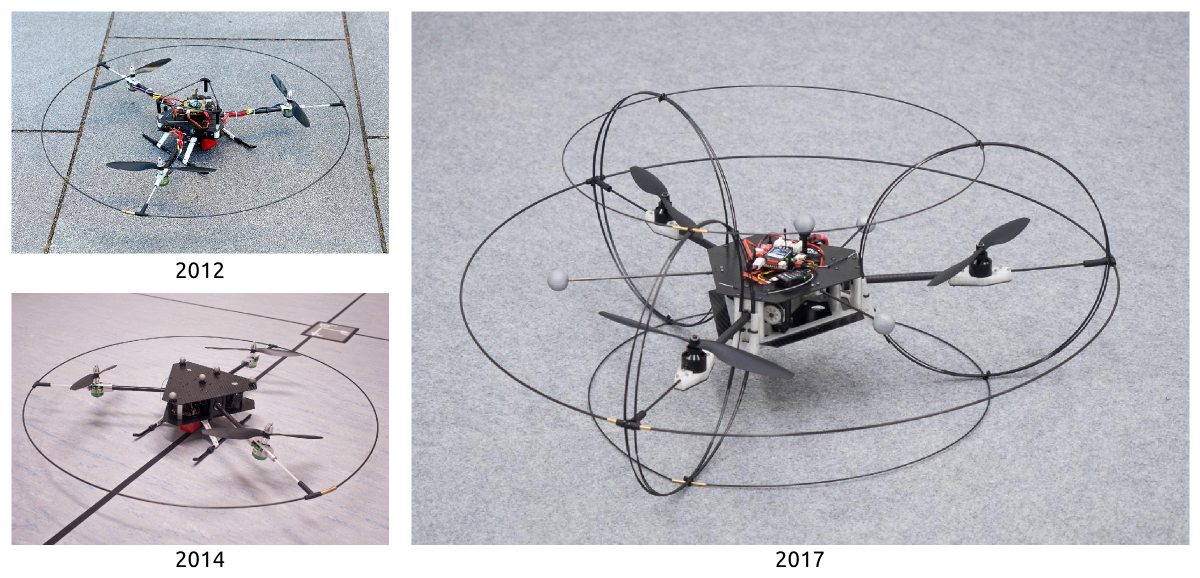
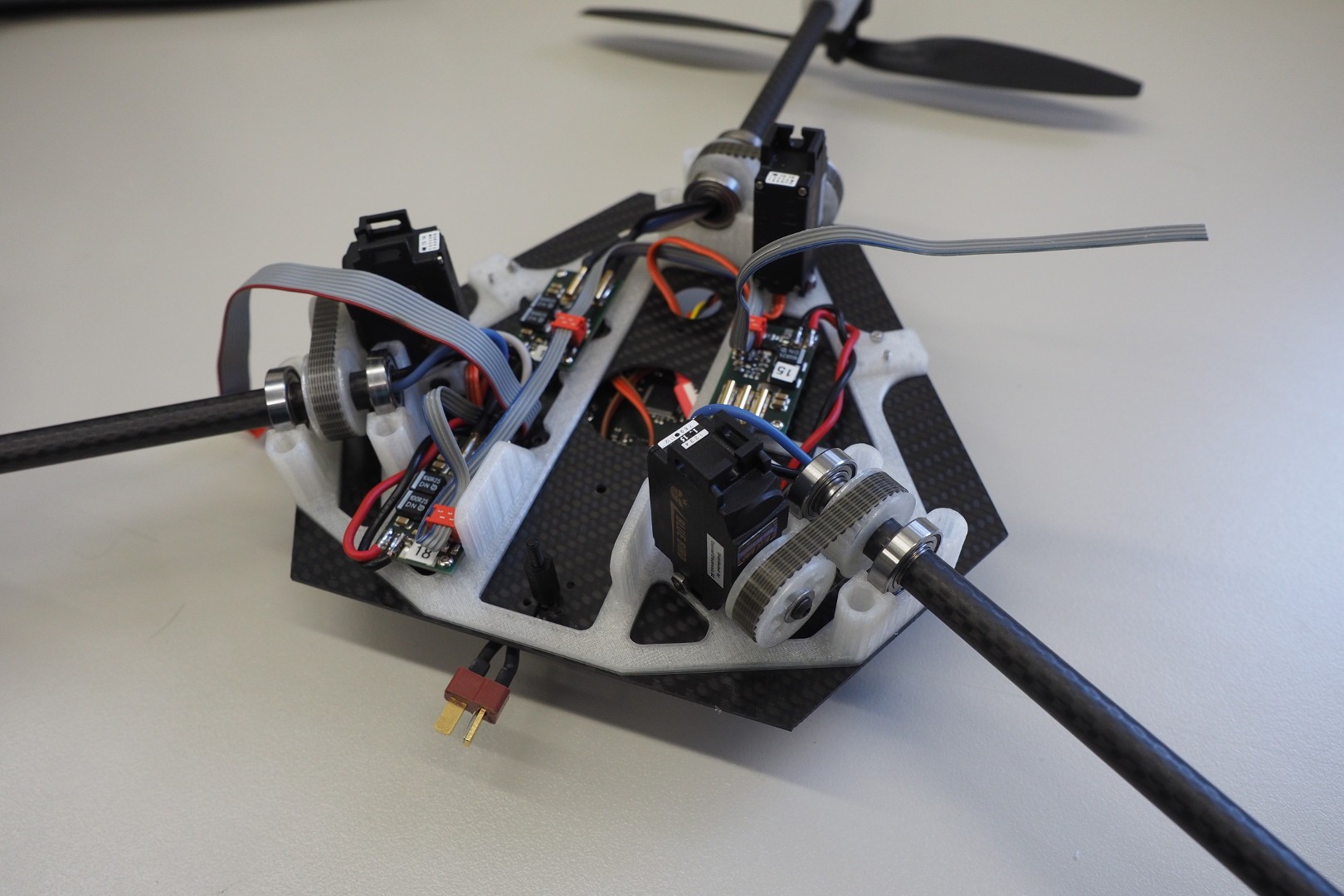
Am LSR wurde, auf früheren Erfahrungen mit einem Quadrokopter aufsetzend, ein eigener Trikopter entwickelt. Bei diesem sind drei Propeller jeweils auf einem der drei symmetrisch angeordneten Arme fixiert, wobei jeder der drei Arme um seine Achse gedreht werden kann. Dies ermöglicht neue Flugmanöver, die mit starr befestigten Propellern nicht möglich sind. Insbesondere ist es mit dieser Konfiguration möglich, aus einem stationären Schwebeflug in einen Horizontalflug überzugehen, ohne das ganze Fluggerät zu kippen. So ergibt sich beispielsweise ein offensichtlicher Vorteil bei Filmaufnahmen. Auch ein schnelles Gieren ist möglich. Insgesamt wird die Manövrierfähigkeit im Gegensatz zu den nicht vollständig direkt gesteuerten Fluggeräten mit starr fixierten Propellern verbessert, da der LSR-Trikopter durch die sechs Stelleingriffe für jeden mechanischen Starrkörper-Freiheitsgrad einen eigenen Stellantrieb aufweist.
Videos
Regelung von Trikoptern beim gemeinsamen Transport von an Seilen aufgehängten Lasten
Vorstellung des Trikopters

Flugexperimente mit dem Trikopter im Freien

Studentische Beiträge
Modellbasierte Regelung und Inbetriebnahme eines Trikopters mit angehängter Last (Bachelor-Arbeit 2016)
Alexander Gutte
Continued development of the LSR tricopter (Sommer 2013)
Brett Bornhoft (Middle Tennessee State University, USA)
Tricopter State Estimation and Control (Sommer 2012)
Charles Blouin (University of Ottawa, Kanada)
Commande sans capteur mécanique pour le moteur pas-à-pas (2009)
Christophe Fiter (Ecole Centrale de Lille, Frankreich)
Veröffentlichungen
M. Konz, D. Kastelan, D. Gerbet, J. Rudolph, Practical Challenges of Fully-Actuated Tricopter Control, in: Proc. Mechatronics 2018, Glasgow, UK, September 19-21, 2018.
D. Kastelan, M. Konz, and J. Rudolph, Fully actuated tricopter with pilot-supporting control, in: Workshop on Advanced Control and Navigation for Autonomous Aerospace Vehicles, Sevilla, Spain, June 10-12, 2015. IFAC-PapersOnLine, Volume 48, Issue 9, 2015, Pages 79-84. DOI