Quadkopter
Folgeregelung des Quadcopters für aggressive Manöver
Beschreibung
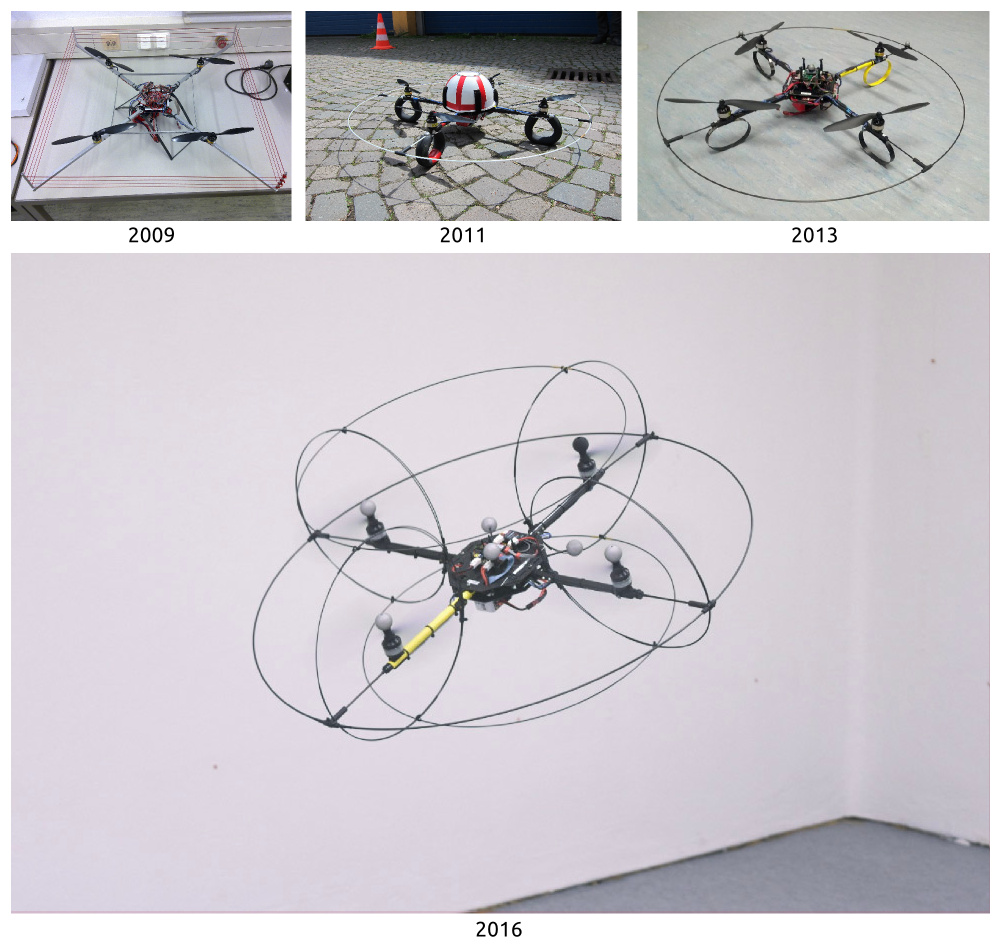
Im Wintersemester 2009 wurde im Rahmen eines Projektpraktikums der erste Quadkopter des LSR aufgebaut, für dessen Regelung erste Experimente durchgeführt wurden. Dieser basierte auf der Hardware von Mikrokopter. Die Hard- und Software des Quadkopters wurde hauptsächlich im Rahmen von studentischen Arbeiten sukzessive weiterentwickelt. Nach aktuellem Stand (2017) sind die einzigen verbleibenden Orginalteile die Motoren und die Propeller.
Der neue Rahmen ist eine Sandwich-Konstruktion aus Karbon-Rohren/Platten sowie 3D-gedruckten Teilen. Der ringförmige Schutzkäfig des Quadkopters besteht aus hochelastischen Karbon-Stäben. Das Gesamtgewicht (inkl. 2200mAh-Akku) konnte damit auf knapp 1kg reduziert werden.
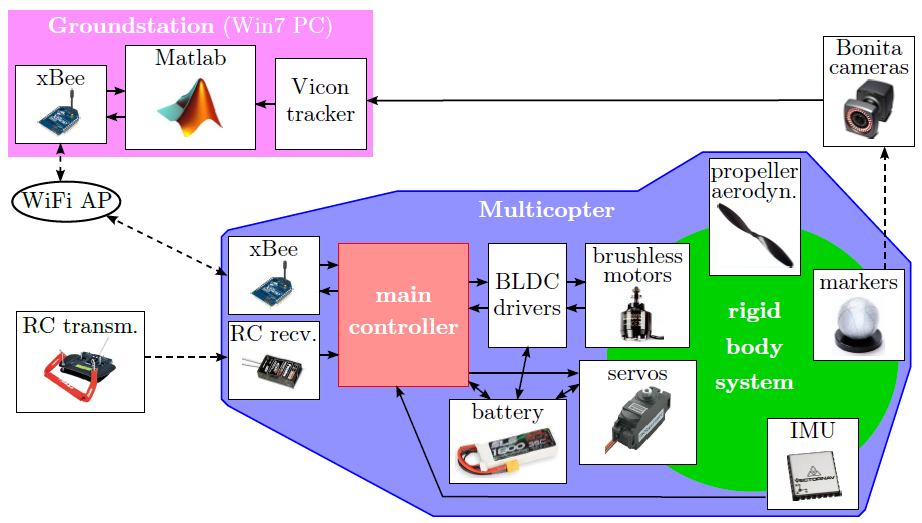
Die Ansteuerung der bürstenlosen Motoren geschieht durch eine am LSR entwickelte Leistungselektronik, welche Stromregelung und Drehzahlschätzung realisiert. Für die Orientierungs- und Drehratenschätzung wird ein IMU, VectorNav VN-100, eingesetzt. Auf dem Kopter sind kugelförmige, reflektierende Marker angebracht, welche von einem externen Vicon-Bewegungserfassungssystem erfasst werden. Auf einer ebenfalls am LSR entwickelten Hauptplatine befindet sich das Gehirn des Quadkopters: ein 32bit 66MHz Atmel Microcontroller, auf dem die Steuerung und Regelung implementiert ist.
Der Quadkopter kann über eine Funk-Fernbedienung wie gewohnt im Labor als auch im Freien gesteuert werden. Zusätzlich besteht eine WLAN-Verbindung zu einem PC, auf dem eine echtzeitfähige Benutzerschnittstelle in MATLAB implementiert ist. Dort werden einerseits Messdaten aufgezeichnet, aber vor allem können von dort andererseits Befehle an den Trajektoriengenerator auf dem Quadkopter geschickt werden.
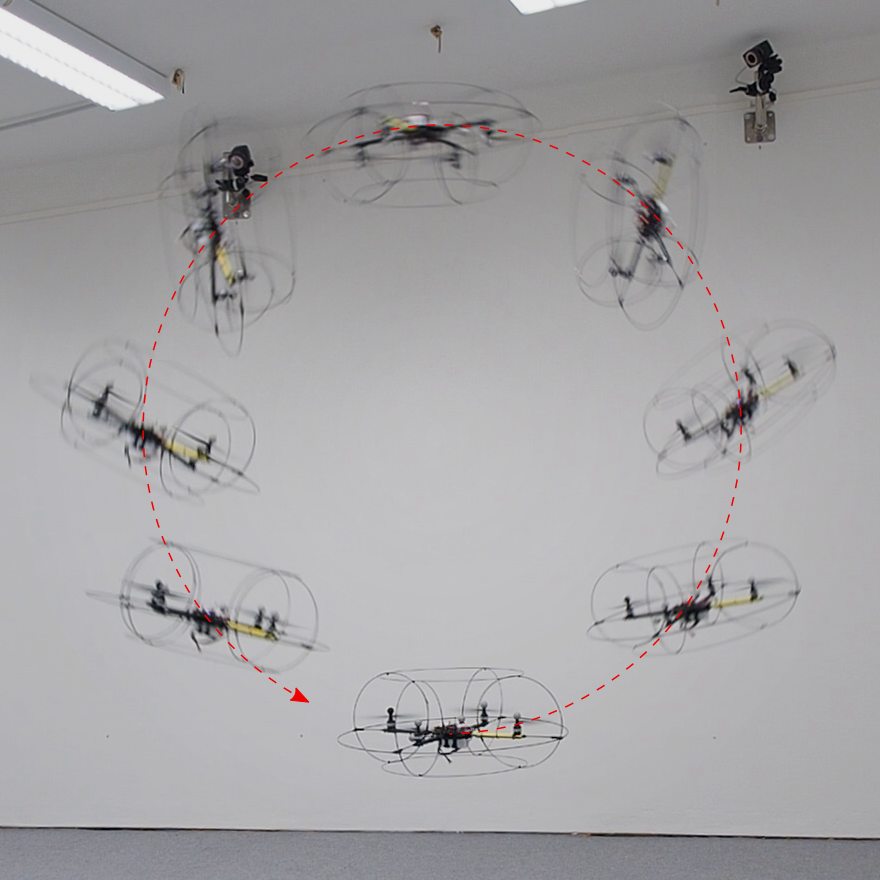
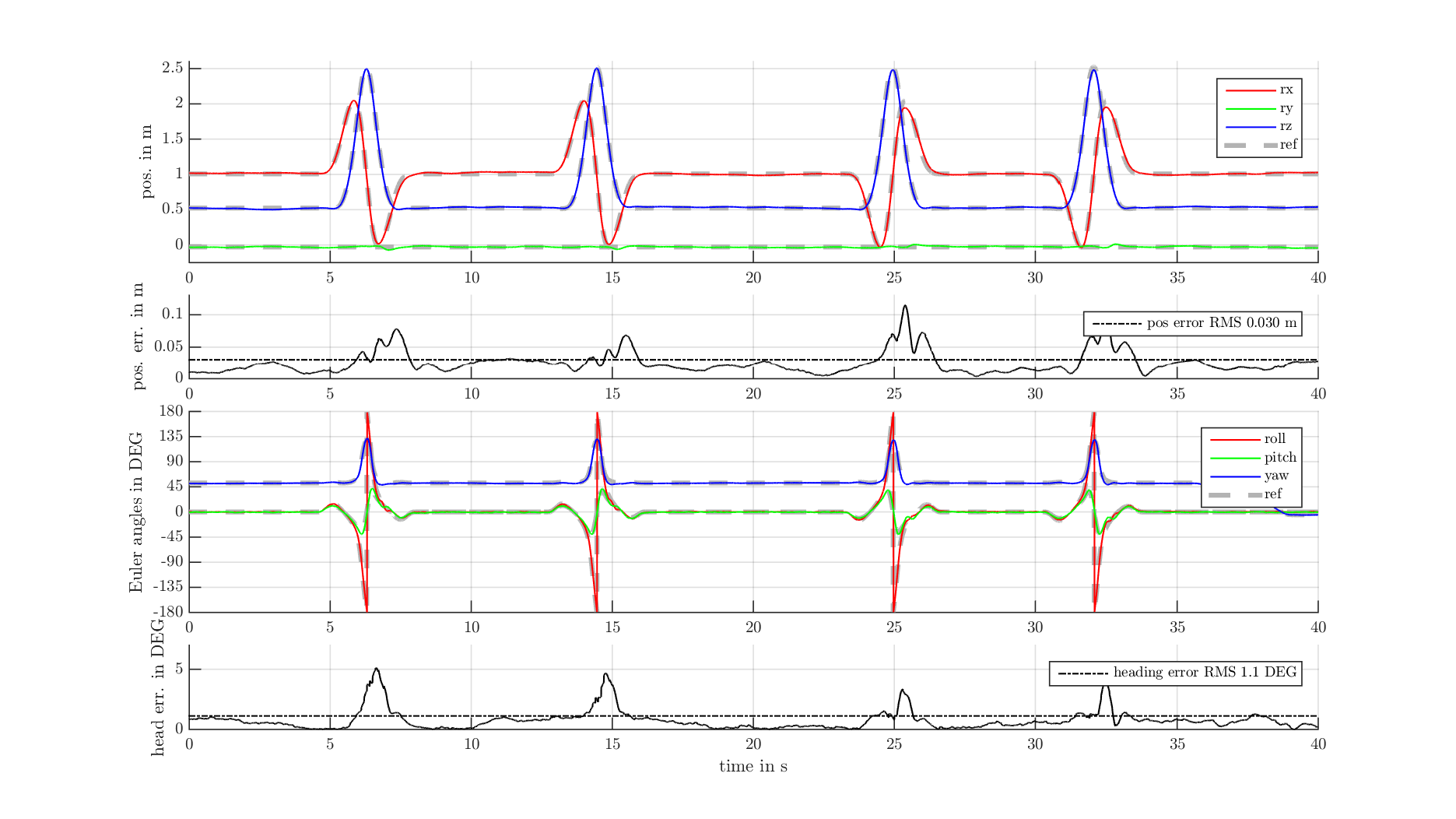
Im Gegensatz zu handelsüblichen Quadkoptern ist der LSR-Quadkopter erheblich agiler. Aufgrund seines geringen Eigengewichts (1kg) und hohem Gesamtschubs (ca. 3kg) kann er Manöver mit mehr als doppelter Erdbeschleunigung absolvieren. Vor allem besitzt er eine Folgeregelung für Position und Orientierung, der im Gegensatz zu etablierten Algorithmen keine Probleme bei extremen Beschleunigungen und/oder Orientierungen hat. Damit lassen sich Trajektorien wie Loopings oder Flips beherrschen, siehe Video.
Studentische Beiträge
Inbetriebnahme eines vierrotorigen unbemannten Fluggeräts
(WS 2009/10)
Fabio Dohr, Christian Stauch, Kai Weber, Daniel Wollscheid
Characterization and implementation of an Ultrasonic Ranging Device for Quadrocopter Altitude Control (Sommer 2011)
Usman Anwer (Yale University, USA)
Veröffentlichungen
M. Konz and J. Rudolph, Redundant configuration coordinates and nonholonomic velocity coordinates in analytical mechanics, in: Proc. 9th Vienna International Conference on Mathematical Modelling, Vienna, Austria, February 21-23, 2018, pp. 409–414, 2018. DOI
M. Konz, J. Rudolph, Beispiele für einen direkten Zugang zu einer globalen, energiebasierten Modellbildung und Regelung von Starrkörpersystemen (Examples for a direct approach to global energy-based modeling and control of rigid body systems), at - Automatisierungstechnik, 64, 96-109, 2016. (Best paper award) DOI
M. Konz and J. Rudolph, Equations of motion with redundant coordinates for mechanical systems on manifolds, in: Proc. 8th MATHMOD, Vienna, Austria, February 18-20, 2015, pp. 697-698, 2015. DOI
M. Konz and J. Rudolph, Quadrotor tracking control based on a moving frame, in: Proc. 9th IFAC Symposium on Nonlinear Control Systems, Toulouse, France, September 4-6, 2013, pp. 80-85, 2013. DOI