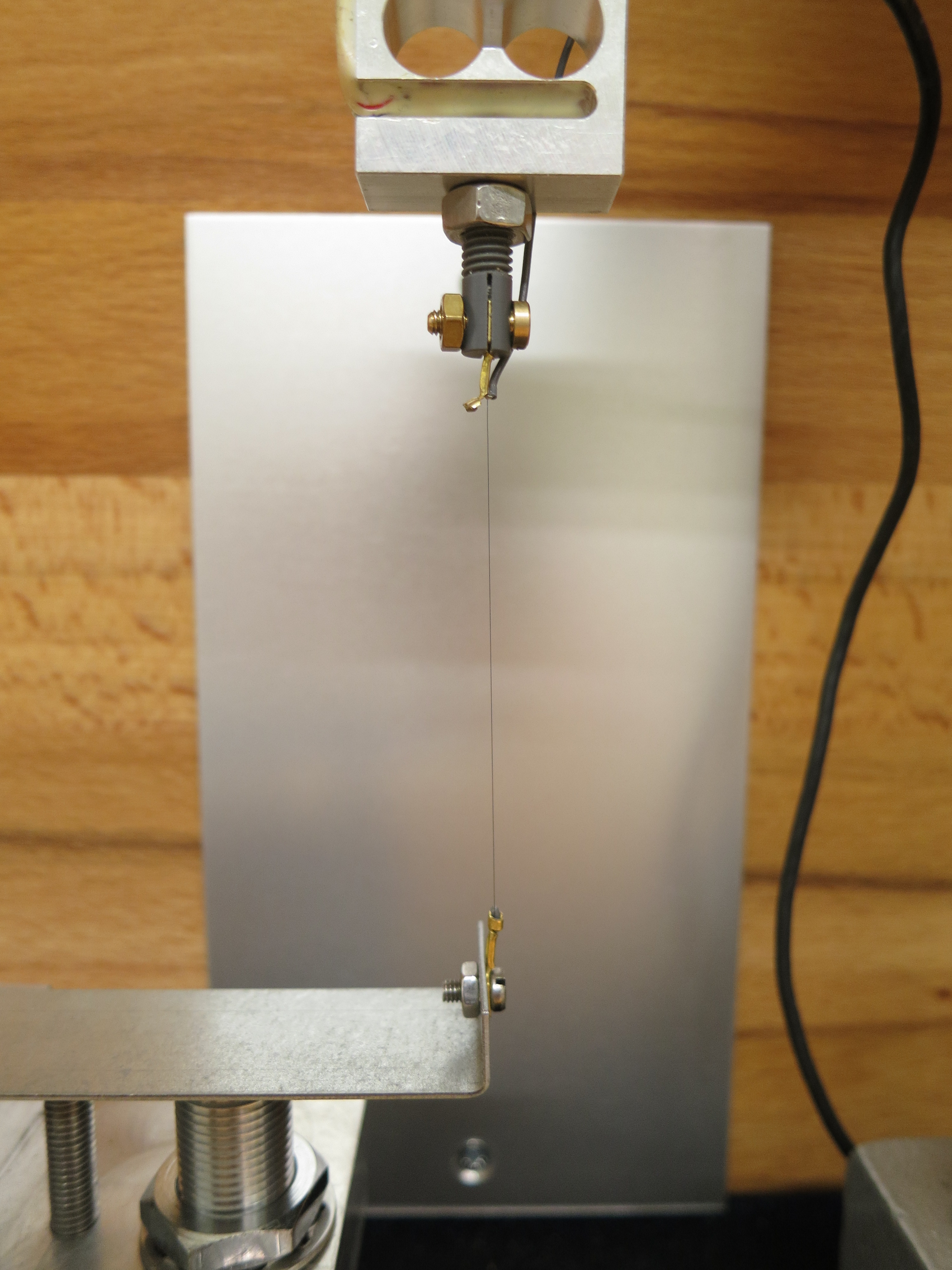
Shape Memory Alloy Actuators
So-called "active" materials can be used in conjunction with suitable control and signal processing strategies as gearless and sensorless, very compact and noiseless drives. This is because active materials combine actuator and sensor properties. An example of active materials are thermally activated shape memory alloys (SMA), such as NiTi. If these are heated, the structure of the crystal lattice changes. Externally, this leads to a contraction of the actuator. During the subsequent cooling, the actuator elongates again. Therefore, SMA wires are also called "metal muscles". Length changes of approx. 5% can be realized with several hundred thousand load cycles. In mechatronic applications, SMA actuators are controlled by applying an electric current. As a result of the change in shape, lattice and temperature, the electrical resistance of the actuator changes, which allows conclusions to be drawn about its deflection. At the Chair for Systems Theory and Automatic Control, in cooperation with the Chair for Unconventional Actuators, model-based methods for robust trajectory tracking control of SMA actuators based on thermodynamically motivated material models are being developed and tested in practice. In order to enable sensorless operation, real-time algorithms for reconstructing the actuator position from the electrical resistance are also being developed.
(in connection with shape memory actuators see also bionic robots)

L. Kiltz, J. Rudolph, D. Gerbet, On Flatness-Based Control for Shape-Memory Alloy Actuators, in: Mathmod 2018 Extended Abstracts , Vienna, Austria, 2018. DOI.
B.Sc. M. Janocha