GROKO-Plan
GRaph-based, Optimal and COoperative Trajectory planning for Interacting Automobiles
Description
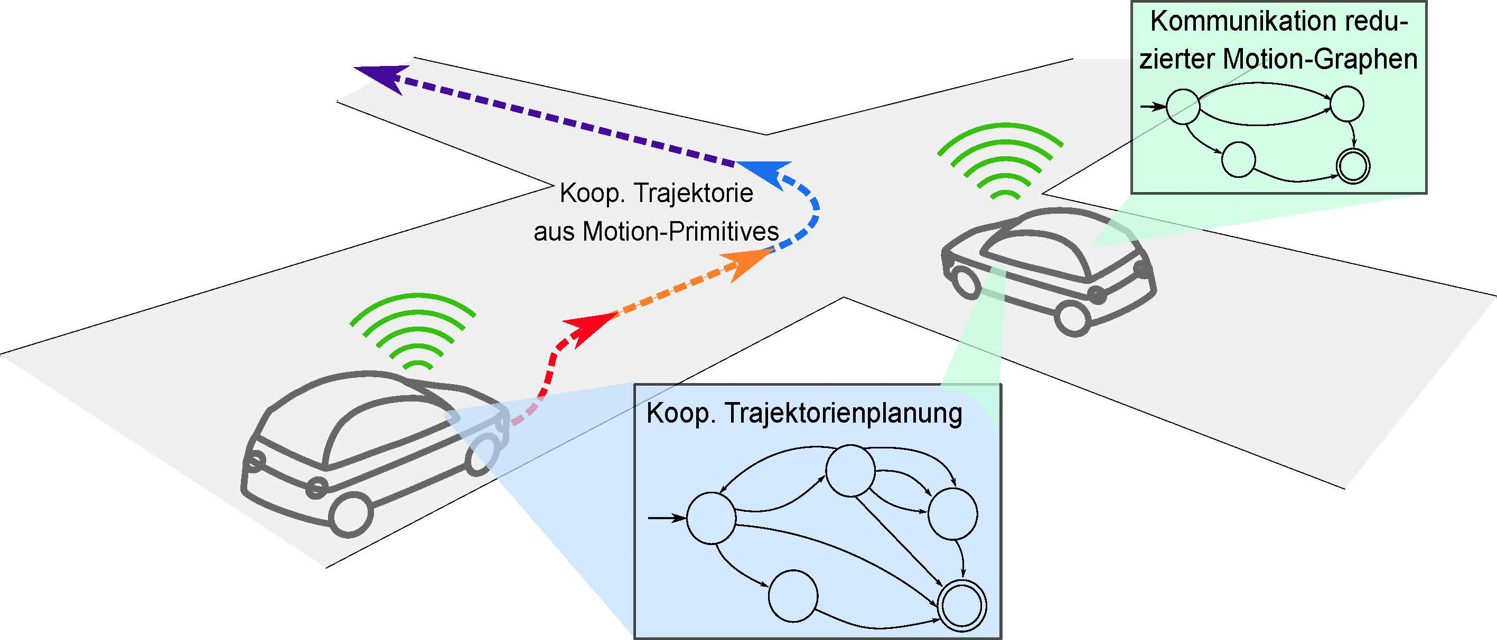
This project aims at developing a graph-based planning method for optimal cooperative trajectories for interacting vehicles. Our research includes the theoretical analysis as well as the practical implementation of a distributed cooperative trajectory planning method, which will be validated for a cooperative traffic intersection scenario on different test platforms.The major challenges of distributed cooperative trajectory planning are dependability of planned trajectories (I), real-time compliance of the optimizer on board of the vehicles (II), and a realizable communication effort between vehicles (III). The first challenge arises since conflict-free trajectories are mandatory. The second challenge is due to high-dimensional non-convex optimization problems, as they occur when many road users have to be taken into account. The third challenge is caused by the thrive for cooperation, i.e. to solve the cooperative optimization problem on one vehicle, parts of the optimization problems of other road users have to be exchanged.In order to meet these challenges, this project proposes to use reduced trajectory planning libraries, comprised of maneuvers and trim primitives, for cooperative trajectory planning. Trajectory planning is then performed by distributed model predictive control (DMPC) working on reduced cooperative graphs. Uncertainty in perception and prediction is considered in robust DMPC methods. Thereby, conflict free trajectories can be generated (I). All together, the planning method provides trajectories which are sequences of maneuvers and trim primitives. This considerably reduces the search space and enables real-time optimization (II). In contrast to existing graph-based approaches, the novel trajectory planning method on an individual vehicle works cooperatively und takes into account objectives and restrictions of neighboring vehicles. Reducing the graphs before communicating them is crucial to our approach. It simplifies the complexity of the optimization problems (II) and the communication effort becomes acceptable (III).The simulative validation of the novel algorithms within this project is based on the simulation platform which has been developed within the SPP during the first funding phase. In particular, developed algorithms for cooperative perception and prediction as well as the archive of traffic scenarios will be used. In turn, the simulation platform will be extended by the results of this project. We will make use of evaluation metrics and benchmark systems, e.g. CommonRoad, which have been and will be developed within the course of the SPP.
Duration: 2019 - 2023
Collaboration
- Dr.-Ing. Bassam Alrifaee (RWTH Aachen University)
- M.Sc. Patrick Scheffe (RWTH Aachen University)
Support
This research is supported by the Deutsche Forschungsgemeinschaft (German Research Foundation) within the Priority Program SPP 1835 “Cooperative Interacting Automobiles” (grant number: KO 1430/17-1).