Flatness-Based Control: An Introduction
Joachim Rudolph
Available (March 2021) online in print and PDF formats from the publisher:
Abstract
Flatness-based control is a powerful model-based nonlinear control method that has also found its way into demanding industrial applications. The example-based presentation of this introduction establishes the fundamentals of the method using only basic mathematical tools and without much prerequisites from linear control theory. It serves as notes for the author's courses on the subject after more than 20 years of teaching it at several universities in different countries.
Tutorial
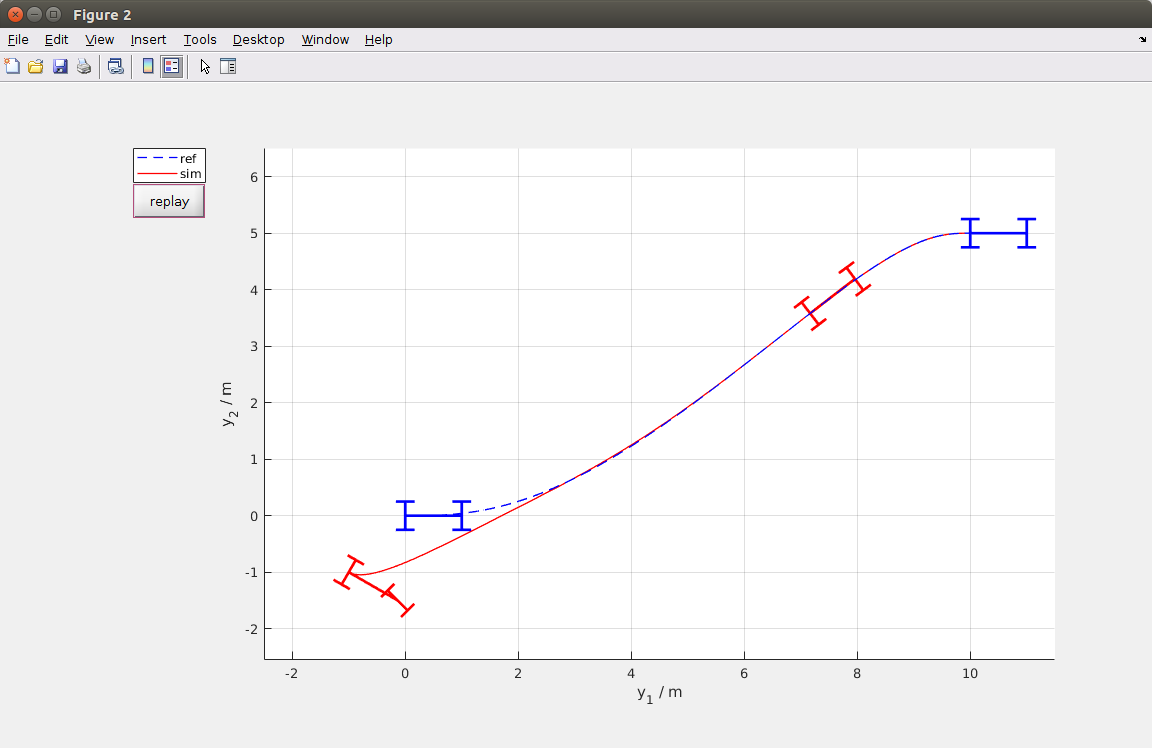
A 5-part Matlab tutorial is provided that implements a number of flatness concepts from the text for the recurring example of the kinematic car. This tutorial is packaged as a zip-file of code and documentation car.zip and covers:
- simulating the car
- open-loop controller
- closed-loop dynamic controller
- explicit path parametrization and open-loop controller
- quasi-static closed-loop controller